

Amphibious robot with integrally-driven wheel paddle legs
An amphibious and robot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of single movement mode, rapidity, maneuverability, stability, insufficient obstacle surmounting ability, weak operation ability, etc., to achieve flexible movement, Excellent obstacle-surmounting ability and weight-reducing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings.
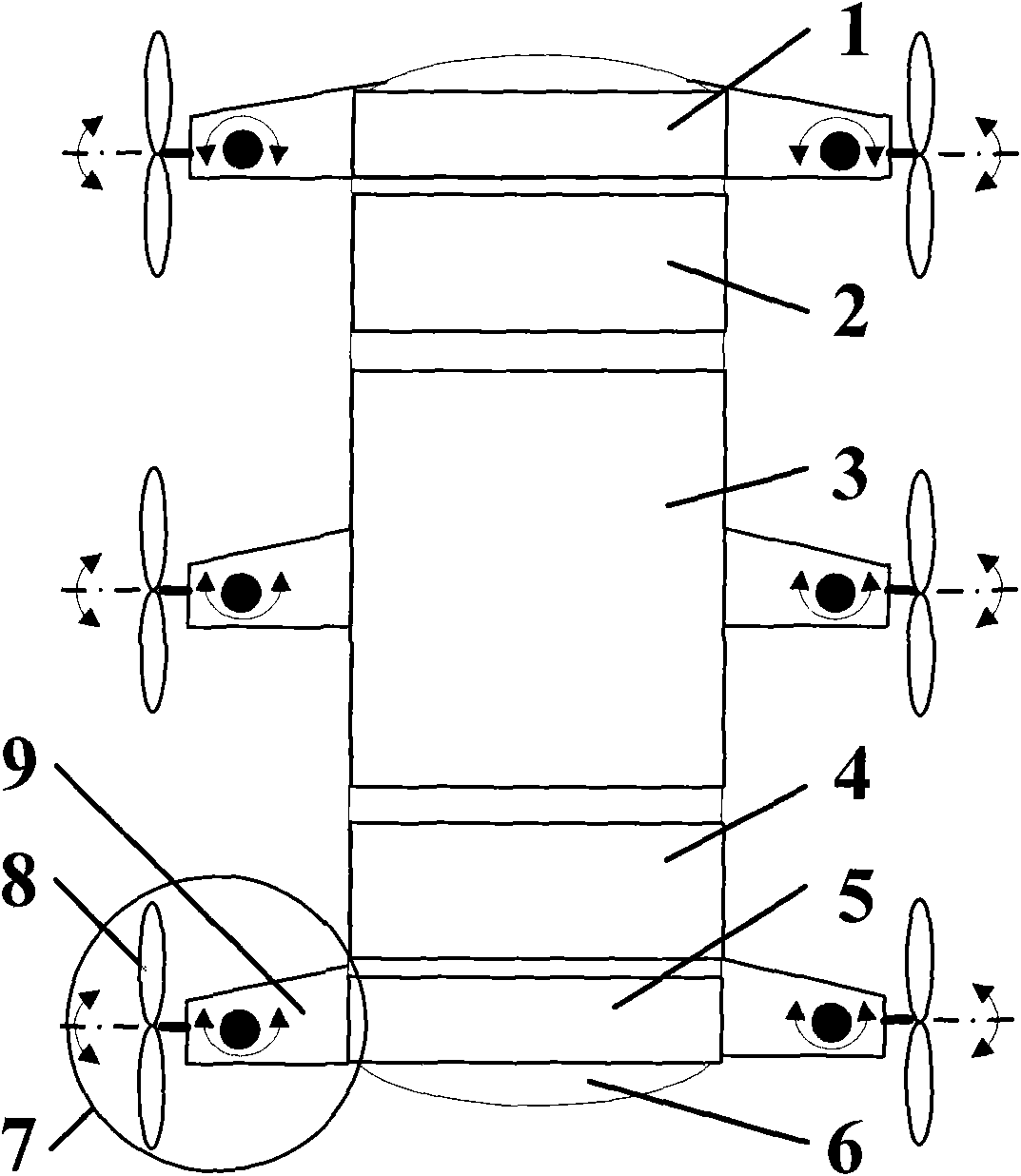
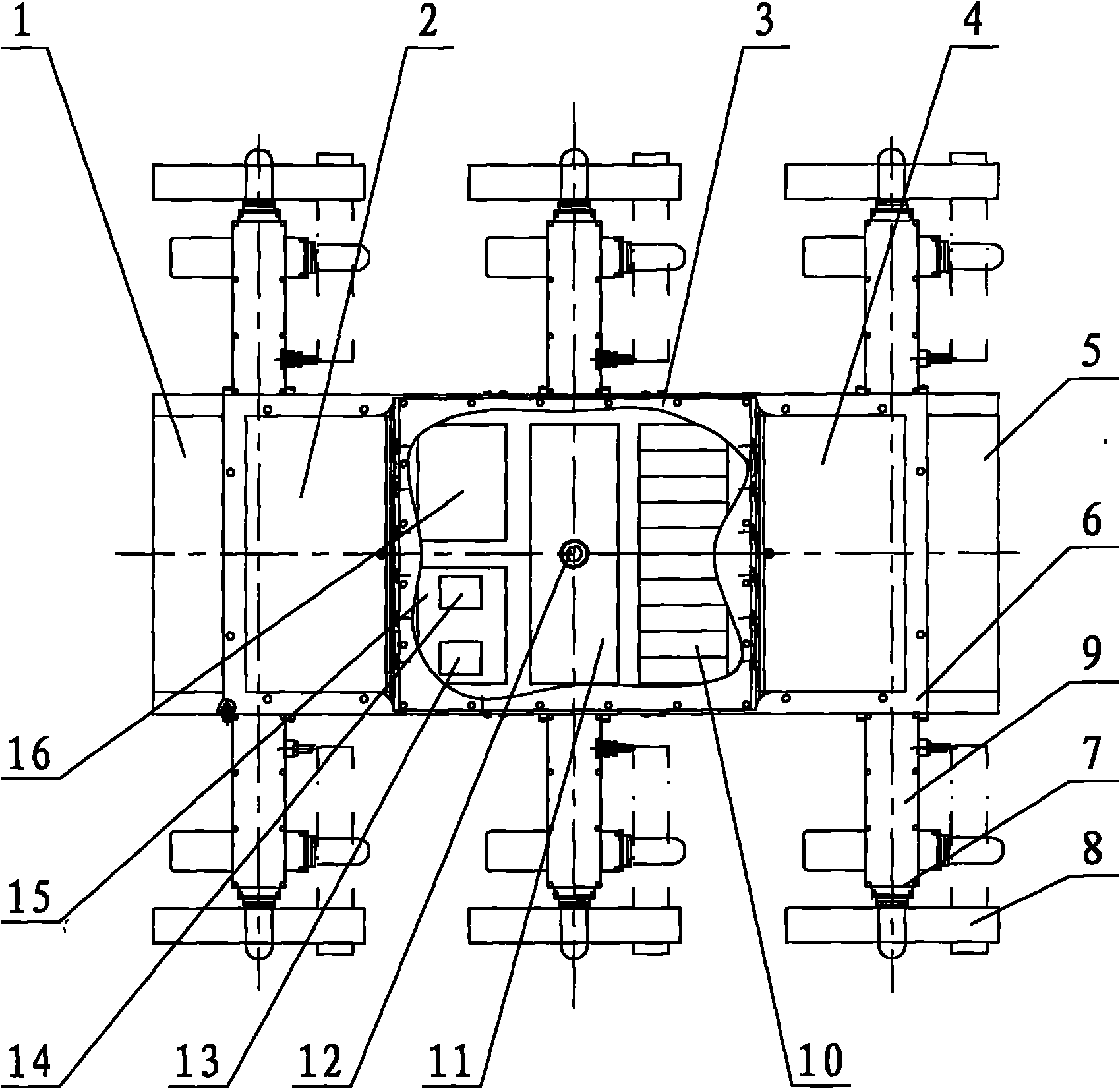
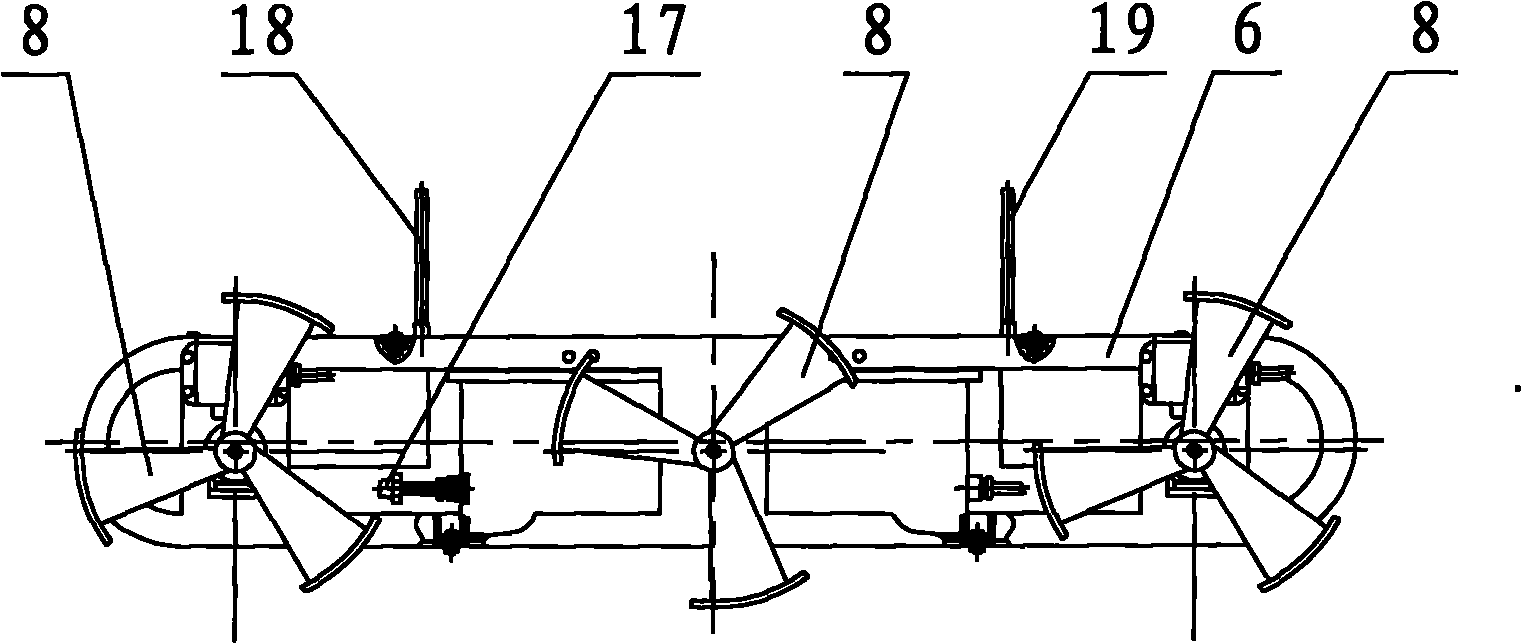
[0023] Such as Figure 1~3 As shown, the present invention includes a front buoy 1, a middle front buoy 2, a watertight electronic cabin 3, a middle rear buoy 4, a rear buoy 5, a frame 6 and a wheel leg driving module 7, wherein the front buoy 1, the middle front buoy 2, the watertight The electronic cabin 3, the middle and rear buoys 4 and the rear buoys 5 are sequentially fixed and installed on the frame 6 by screws; on the frame 6, there are multiple groups of paddle leg drive modules 7, and each group is composed of two wheel paddle leg drive modules 7. Symmetrically installed on both sides of the frame 6; the wheel paddle leg drive modules 7 in this embodiment are three groups, six, symmetrically distributed in the front end, middle and rear end of the frame 6, the six wheel paddle leg drive modules 7 have the same structure, Both include the paddle leg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More