Device and method for controlling moment
A technology for controlling torque and torque, applied in the direction of non-electric variable control, control/adjustment system, speed/acceleration control, etc., can solve the problems of reducing system response bandwidth, inability to generate force feeling, inflexible manipulation, etc., and achieve systemic suppression Interference, strong anti-interference ability, guaranteed response speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
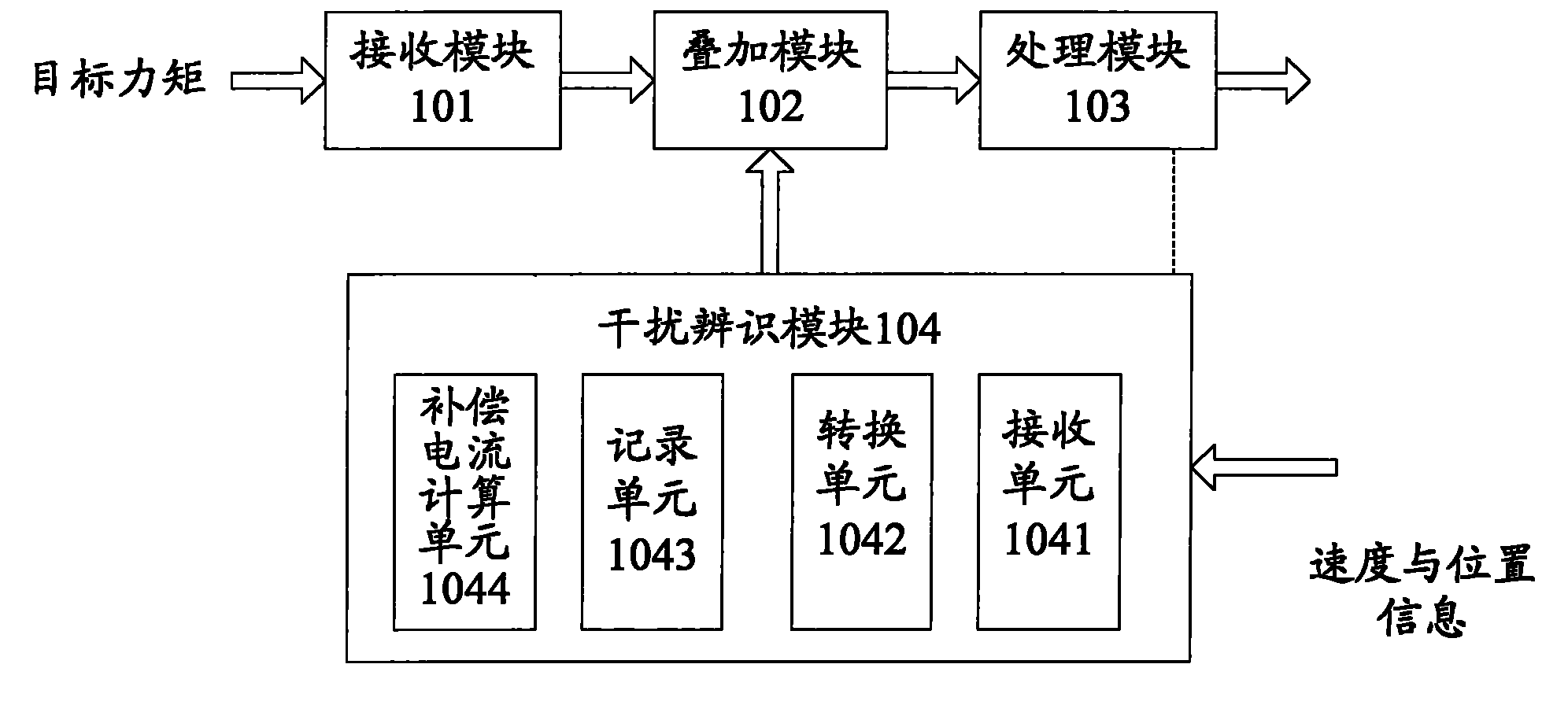
[0045] In order to ensure the smooth output of torque and improve the system response speed, the embodiment of the present invention provides a device for controlling torque, see figure 1 , the device consists of:
[0046] Receiving module 101, superposition module 102 and processing module 103;
[0047] A receiving module 101, configured to receive a target torque and convert the target torque into a torque current signal;
[0048] A superposition module 102, configured to superimpose the torque current signal and the compensation current signal, and send the obtained current signal to the processing module 103;
[0049] The processing module 103 is configured to receive the current signal sent by the superposition module 102, process the current signal, and output the processed current signal as an output current signal.
[0050] The unit also includes:
[0051] The interference identification module 104 is used to obtain the relationship between current and angular posit...
Embodiment 2
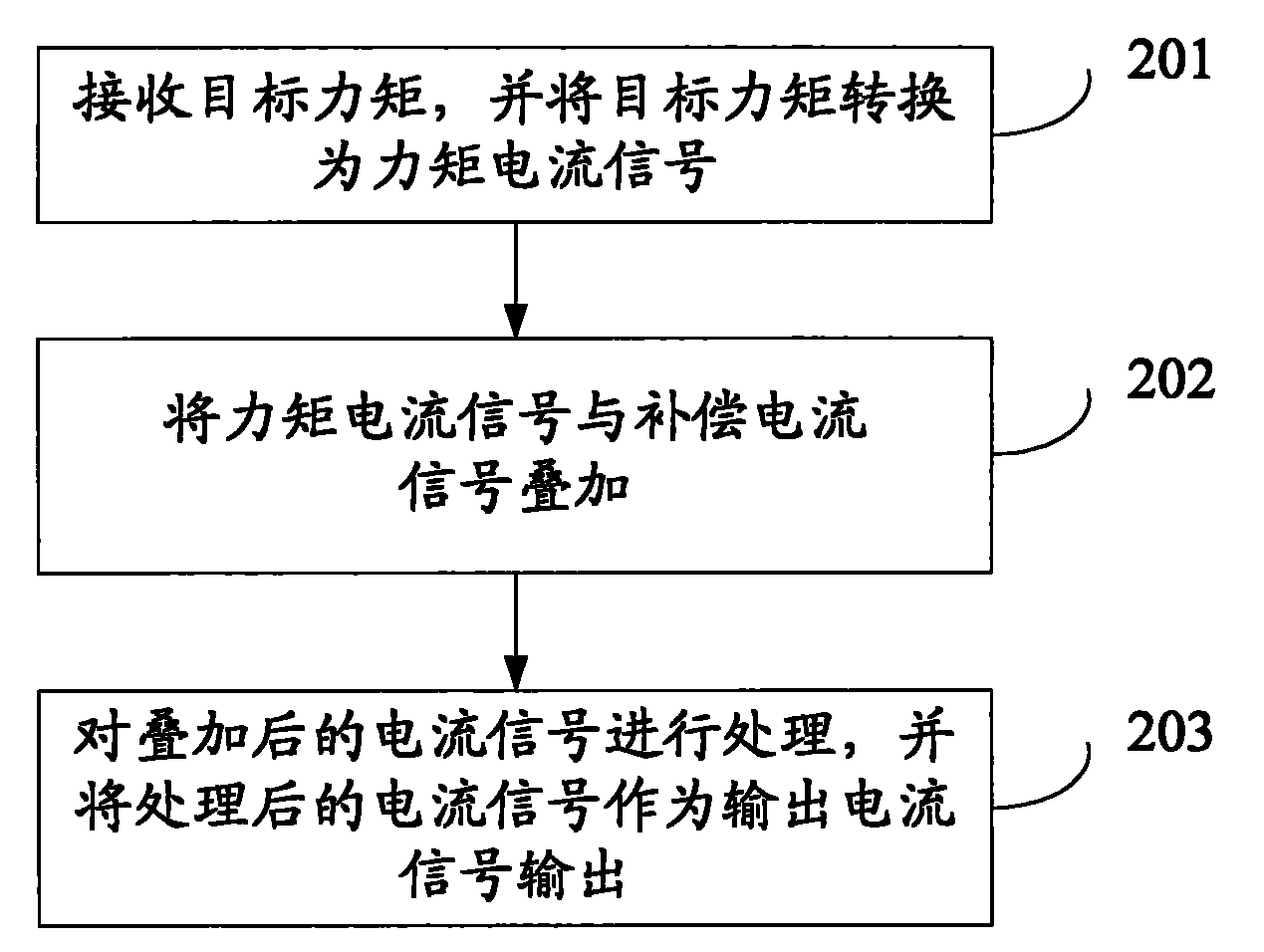
[0061] In order to ensure the smooth output of torque and improve the system response speed, the embodiment of the present invention provides a method for controlling torque using the device for controlling torque described above, see figure 2 , the method includes:
[0062] 201: Receive the target torque, and convert the target torque into a torque current signal;
[0063] 202: superimpose the torque current signal and the compensation current signal;
[0064] 203: Process the superimposed current signal, and output the processed current signal as an output current signal.
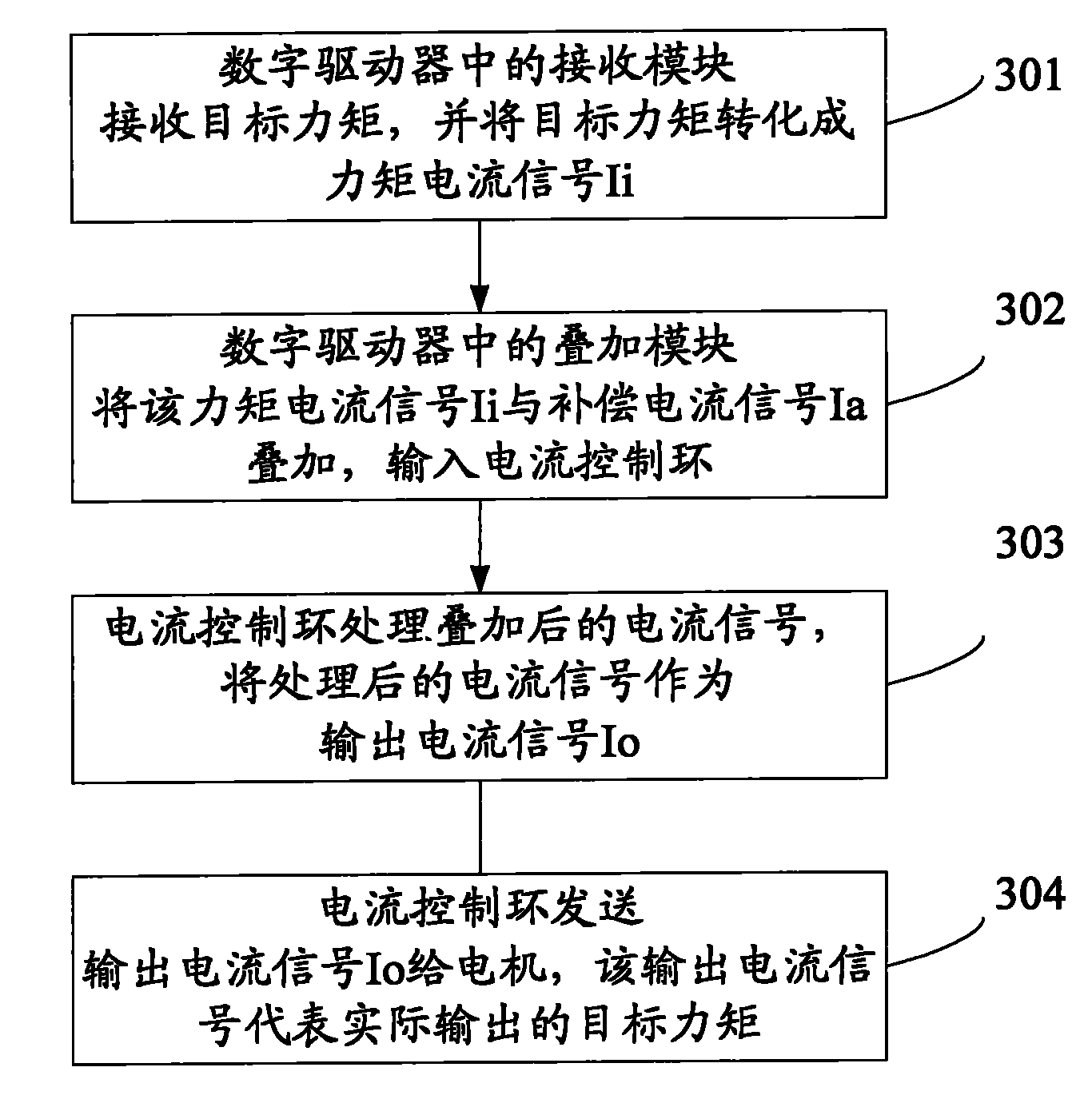
[0065] For ease of description, the embodiment of the present invention only uses a digital driver as an example for controlling the torque. The current converted from the target torque is set as the torque current signal Ii, the output current signal is set as Io, and the compensation current signal is set as Ia. see image 3 , the method specifically includes:
[0066] 301: The receiving module in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More