

Method for testing palletizing robot control software based on Agent
A palletizing robot and control software technology, which is applied in the field of palletizing robot software testing, can solve problems such as poor test results, high manpower and material resources, and inability to specify the location of defects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
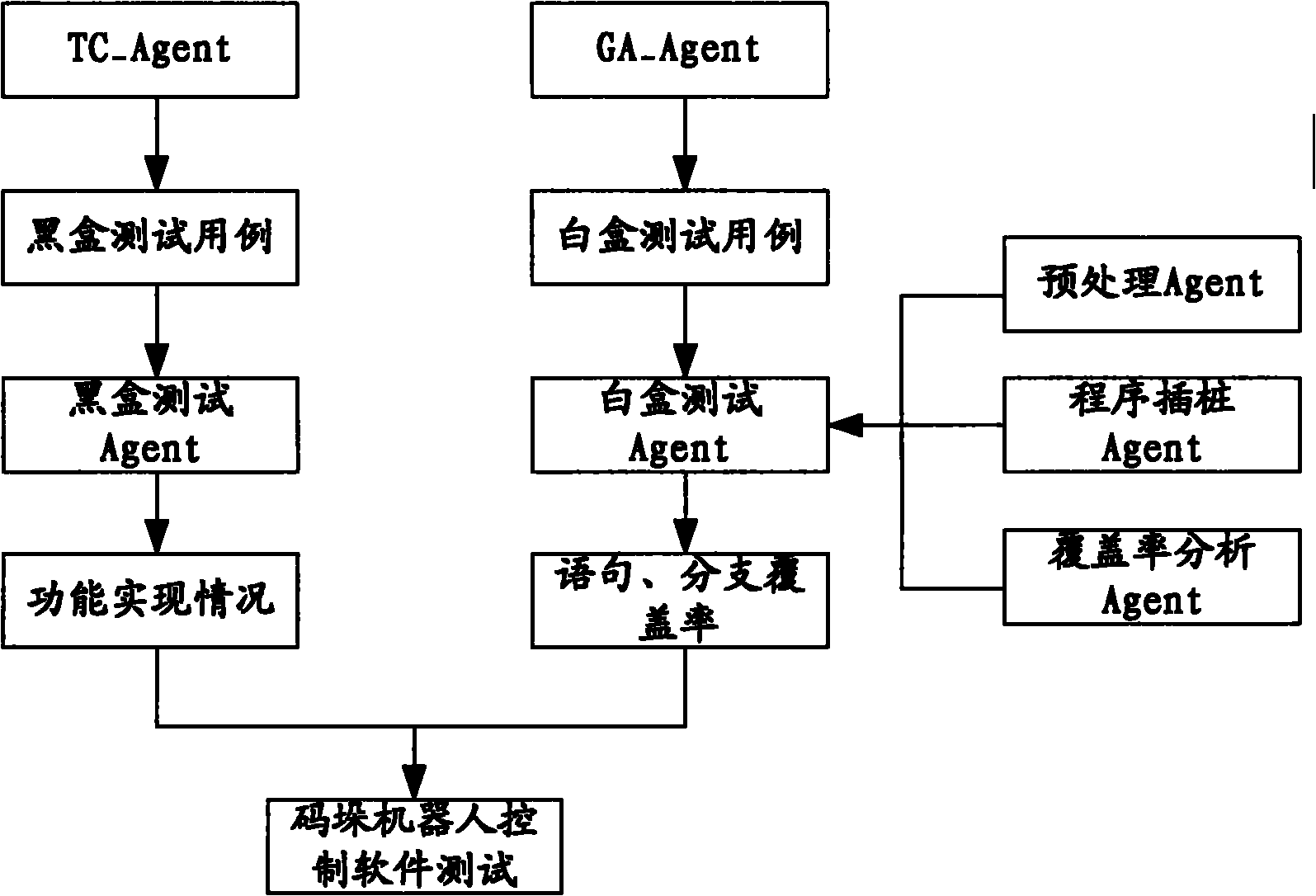
[0039] The core idea of the present invention is: apply the concept of Agent to the testing process, use the autonomous characteristics of Agent, make independent judgments without direct orders and interventions from other Agents or testers, and use the intelligent characteristics of Agent to understand the tester's Test the target, use Agent's social ability to communicate with other Agents. And the palletizing robot software testing system is divided into three Agent modules: black box testing Agent, white box testing Agent, and test case generation Agent (TC_Agent and GA_Agent). Attached below figure 1 The workflow of the present invention and the functions of each step are described in detail.
[0040] 1. Establish an Agent-based BDI model TC_Agent to generate black-box test cases required for testing.
[0041] The present invention applies the constraint relationship between BDIs to the test case generation process, and establishes a BDI-based black-box test case ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More