Novel multifunctional structure variable detection robot
A multifunctional and variable structure technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of Mars exploration robots such as limited space geometry, easy to be restricted by obstacles, damage to core equipment, etc., and achieve strong task completion capabilities , easy to transport and store, increase the effect of working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
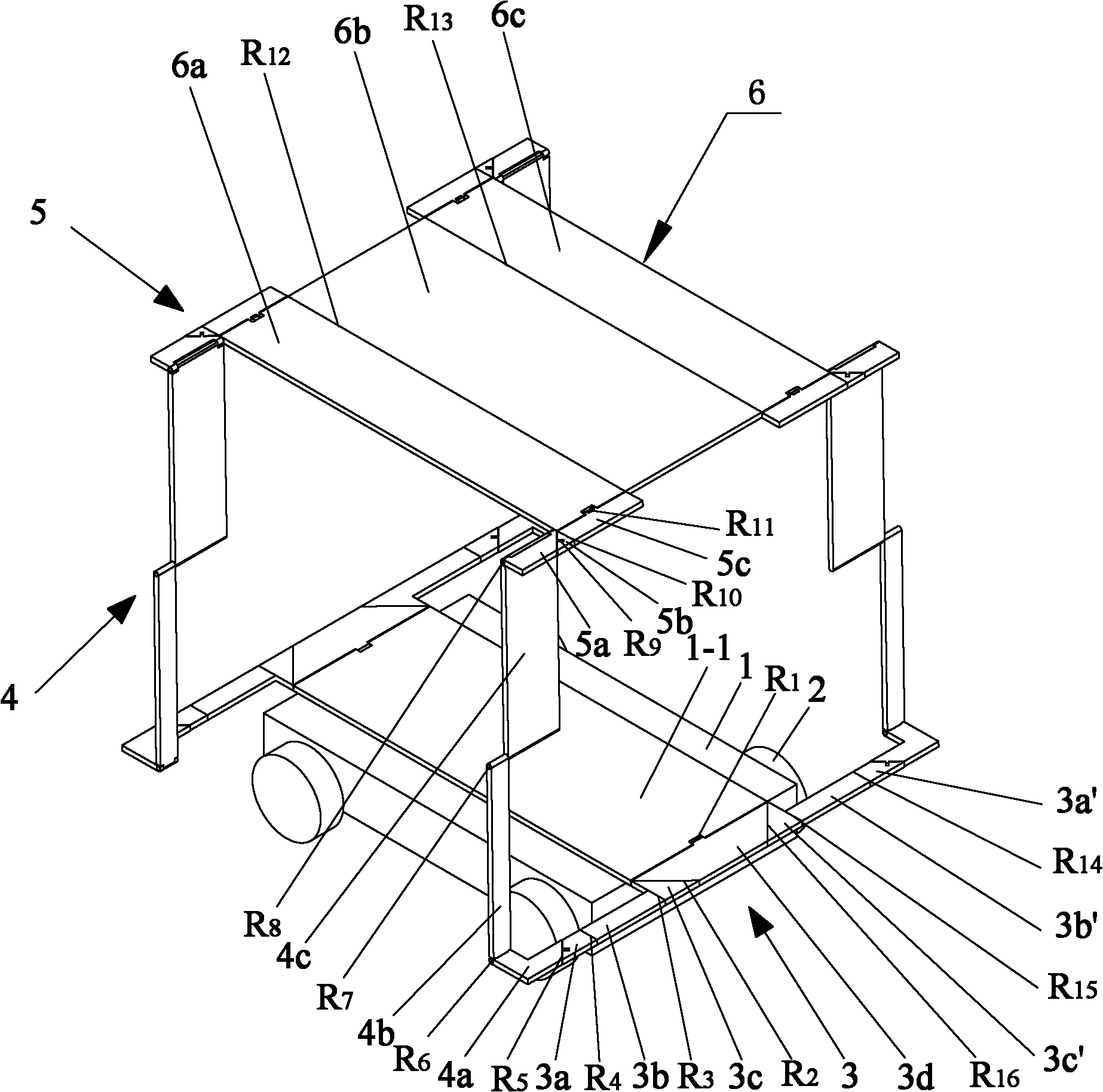
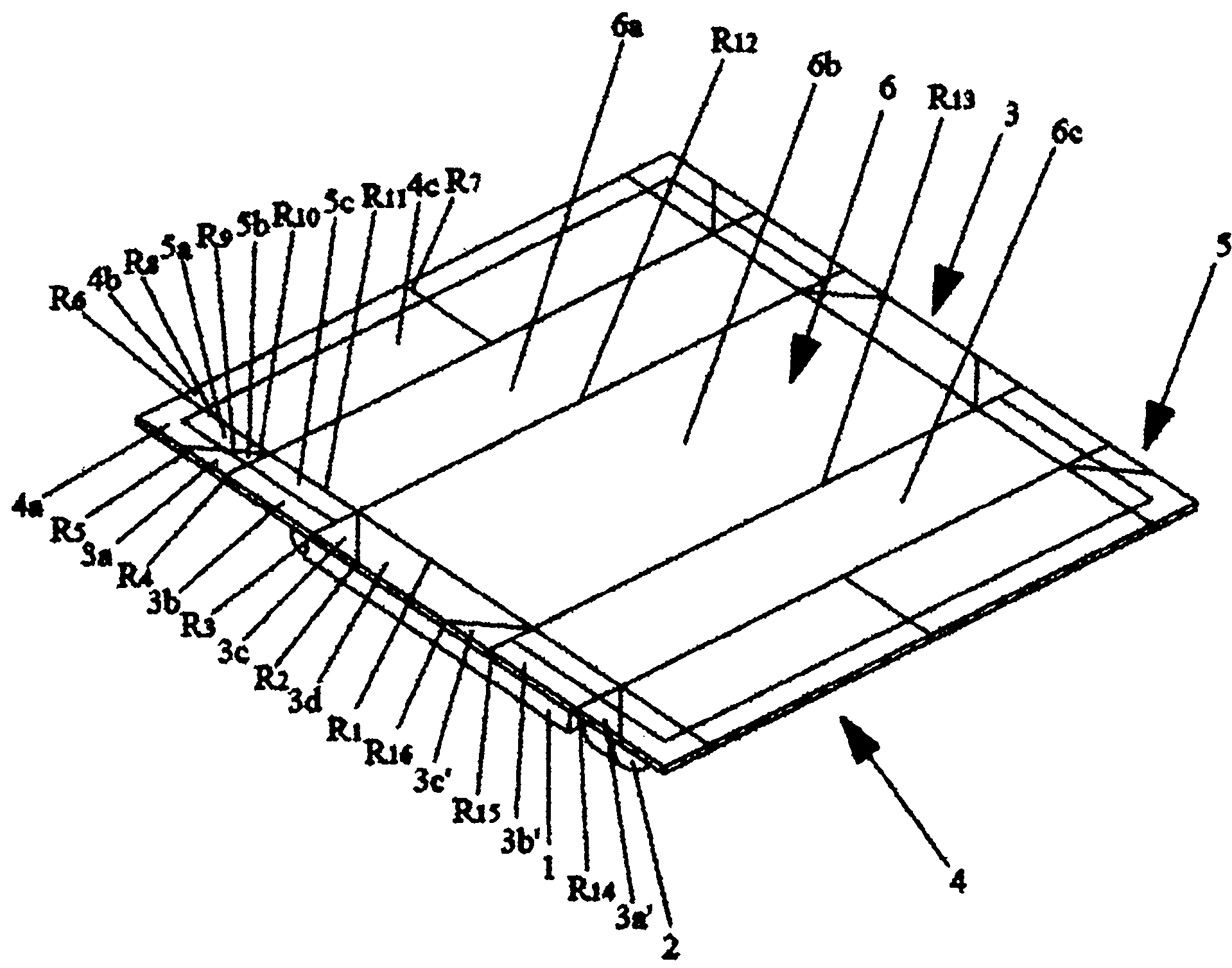
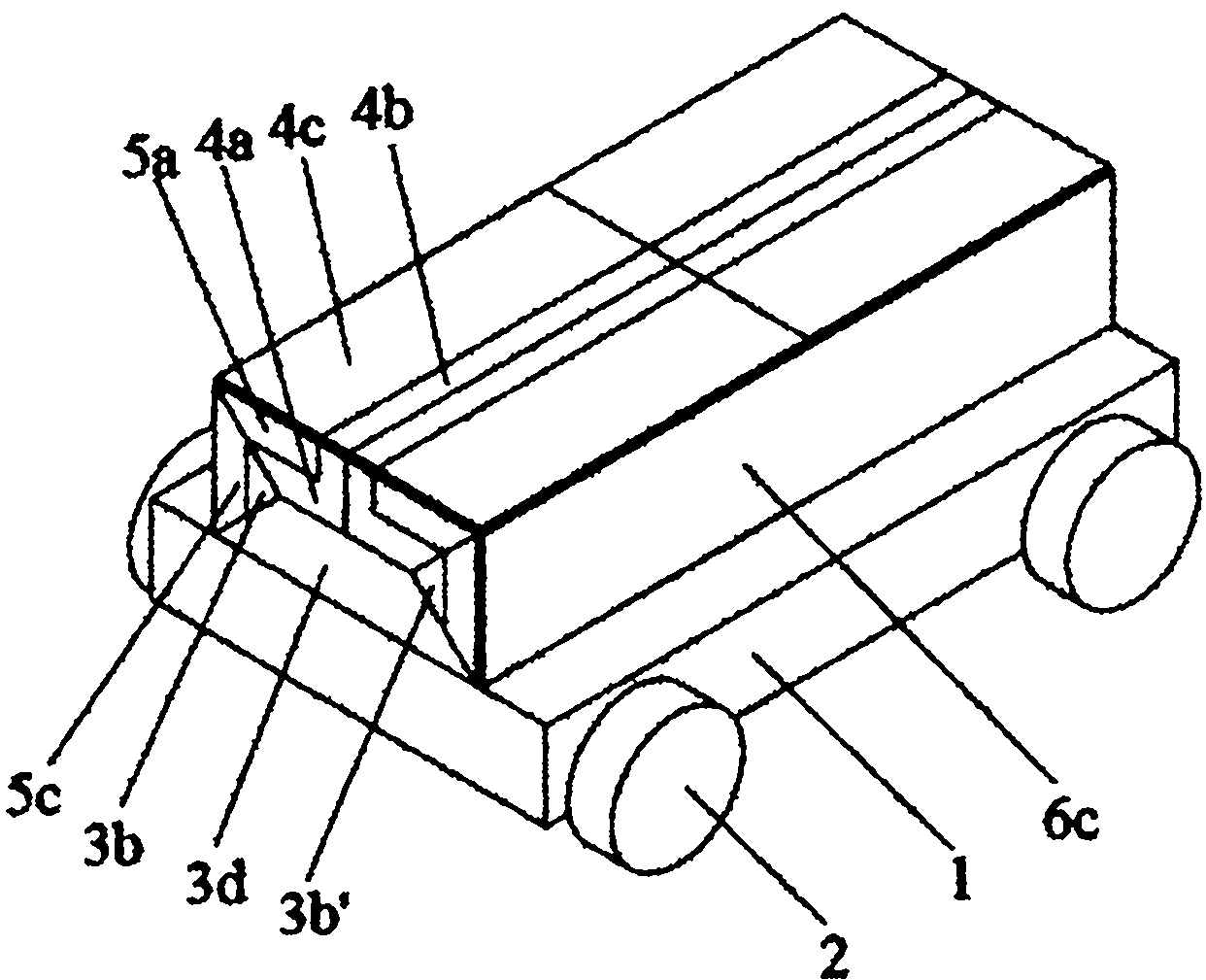
[0025] see Figure 1 to Figure 4 , a new type of multifunctional variable structure detection robot, including a body 1, a hollow frame 1-1 is arranged above the body 1, wheels 2 are arranged below the body 1, and the front and rear ends of the hollow frame 1-1 are A deformed composite member 3 is provided; the deformed composite member 3 is connected to four crawling mechanisms 4 through the rotating pair R5; each of the crawling mechanisms 4 is connected to a deformed composite member 5, and the deformed composite member 5 is connected to a foldable movable platform mechanism 6 .
[0026] The deformed combined member 3 includes a corner plate 3a, a connecting plate 3b, a triangular plate 3c, a central plate 3d, a triangular plate 3c', a co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



