Autonomous dimensionality reduction navigation method for deep sky object (DSO) landing detector
An autonomous navigation and detector technology, applied in the direction of integrated navigators, etc., can solve problems such as divergence, low visibility of orbital parameters, and estimation accuracy of key navigation parameters that affect the stability of autonomous navigation algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
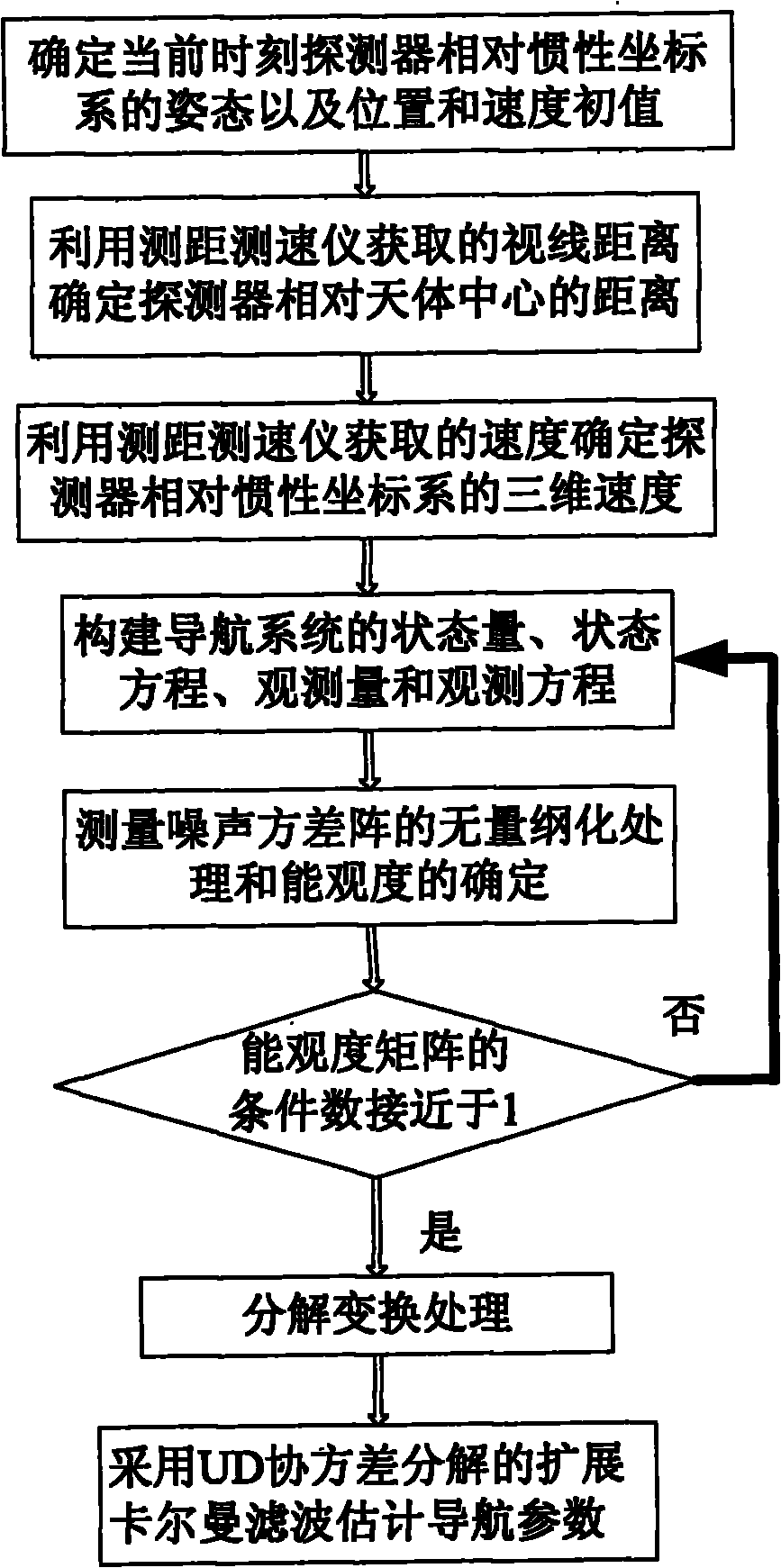
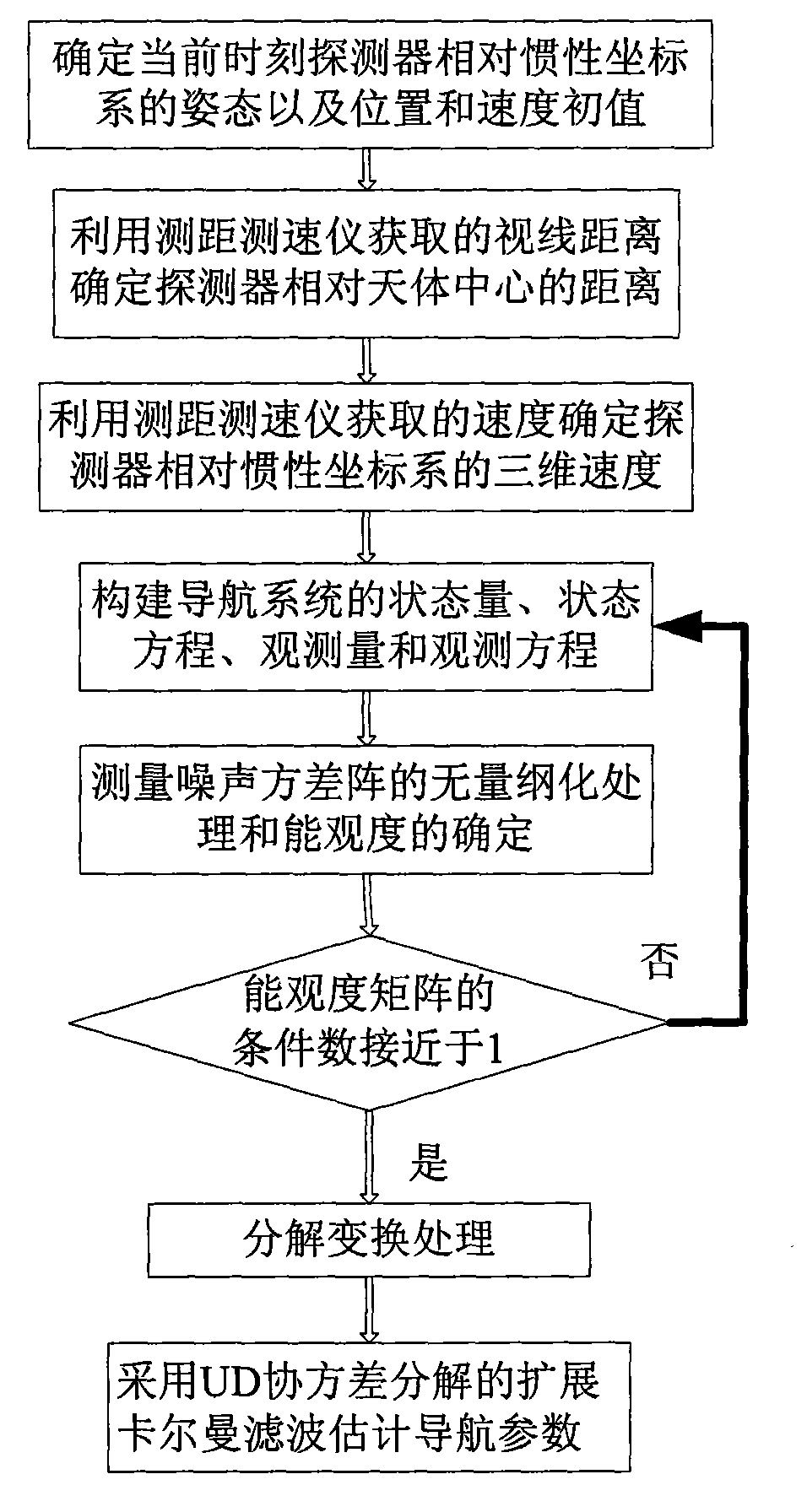
[0040] A dimension-reduction autonomous navigation method for landing a deep-space celestial probe, which comprises the following steps:
[0041] (1) The attitude angular velocity ω measured by the gyro and the velocity increment Δv measured by the accelerometer b and the initial value of the orbit, determine the attitude q and position r of the detector relative to the inertial coordinate system at the current moment I and velocity v I initial value
[0042] Use the gyroscope on the detector to measure the attitude angular velocity ω of the detector, according to the previous moment t 0 The detector inertia attitude four elements q=[q 1q 2 q 3 q 4 ] T , the four elements of the initial inertial attitude are determined by the star sensor measurement before the landing process, and the attitude transformation matrix between the detect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com