

Flywheel simulator based on FPGA
A simulator and flywheel technology, applied in the field of flywheel simulation, can solve the problems of low accuracy of output results and slow operation speed, and achieve the effects of shortening operation time, improving speed and accuracy, and simplifying hardware circuits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
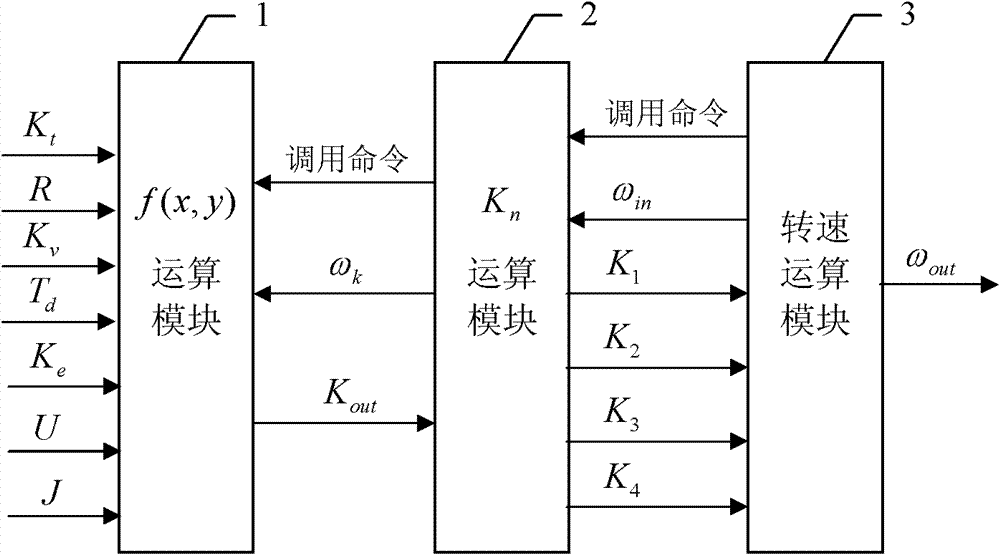
[0034] Specific embodiment one: a kind of FPGA-based flywheel simulator described in the present embodiment adopts FPGA to realize, and comprises three computing modules in the described FPGA, and described three computing modules are respectively f (x, y) computing module 1 、K n Operation module 2 and rotational speed operation module 3;
[0035] The rotational speed operation module 3 is used to send a calling command to K n The operation module 2 starts a Runge-Kutta iterative operation, and is also used to calculate the result information of this iterative operation according to the received parameter information, and use the iterative result information of this time as the last iterative result ω in Send to send K n The computing module 2, meanwhile, also uses the information of the iterative result of this iteration as the speed result ω of the flywheel model out output;
[0036] The K n The operation module 2 is used to send the call command to the f(x, y) operatio...
specific Embodiment approach 2
[0038]Specific embodiment two: this embodiment is to further limit the structure of the rotating speed calculation module 3 in a kind of FPGA-based flywheel simulator described in the specific embodiment one, and the rotating speed computing module 3 described in the present embodiment is composed of the fifth Adder 16, the sixth adder 17, the seventh adder 19, the eighth adder 21, the fifth multiplier 18 and the sixth multiplier 20 are composed of K n Input K of operation module 2 1 and K 2 As the input information of the fifth adder 16, the output sum information of the fifth adder 16 is given to the seventh adder 19; by K n Input K of operation module 2 3 and K 4 As the input information of the sixth adder 17, the sixth adder 17 outputs the sum information to the fifth multiplier 18, and the fifth multiplier 18 multiplies the input information by 2 and then outputs the multiplication result information to the seventh adder 19, the seventh adder 19 outputs the sum result...
specific Embodiment approach 3
[0040] Specific embodiment three: this embodiment is the K in a kind of FPGA-based flywheel simulator described in specific embodiment one n For further limitations on the structure of the computing module 2, the K described in this embodiment n Computing module 2 is made up of selector 15, the 4th multiplier 13 and the 4th adder 14, and described 4th multiplier 13 receives the output result K of f(x, y) computing module 1 out , DT is used as the input information of the fourth multiplier 13, the fourth multiplier 13 outputs the multiplication result to the fourth adder 14, and the output result ω of the last iteration output by the rotational speed calculation module 3 in At the same time as the input information of the fourth adder 14 and the fourth selector 15, the fourth adder 14 outputs the sum information to the selector 15, and the selection result information ω output by the selector 15 k as K n The output information of the operation module 2 is given to the f(x, y)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More