

Object elevation vectorization method and system based on three dimensional laser scanning
A three-dimensional laser and scanning data technology, applied in the field of three-dimensional reconstruction, can solve the problems of large amount of point cloud data, difficulty in extracting features and boundaries, etc., and achieve the effect of reducing the amount of data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] Embodiment 1 is used to illustrate the implementation steps when the method of the present invention is applied to vectorizing point cloud data of a single site.
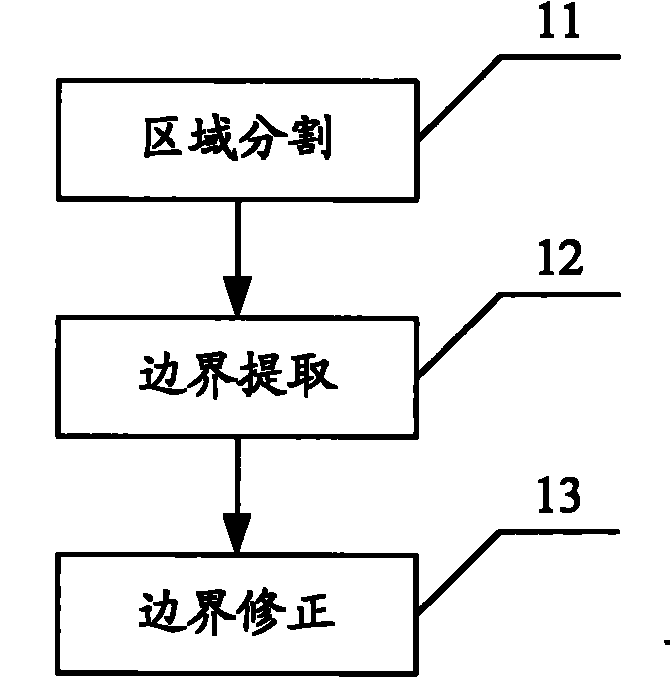
[0044] Please refer to figure 1 The method for building facade vectorization based on three-dimensional laser data provided by Embodiment 1 of the present invention includes steps:
[0045] Step 11, area segmentation, extracting functional areas such as walls, doors, and eaves from the 3D laser point cloud data on the object surface.
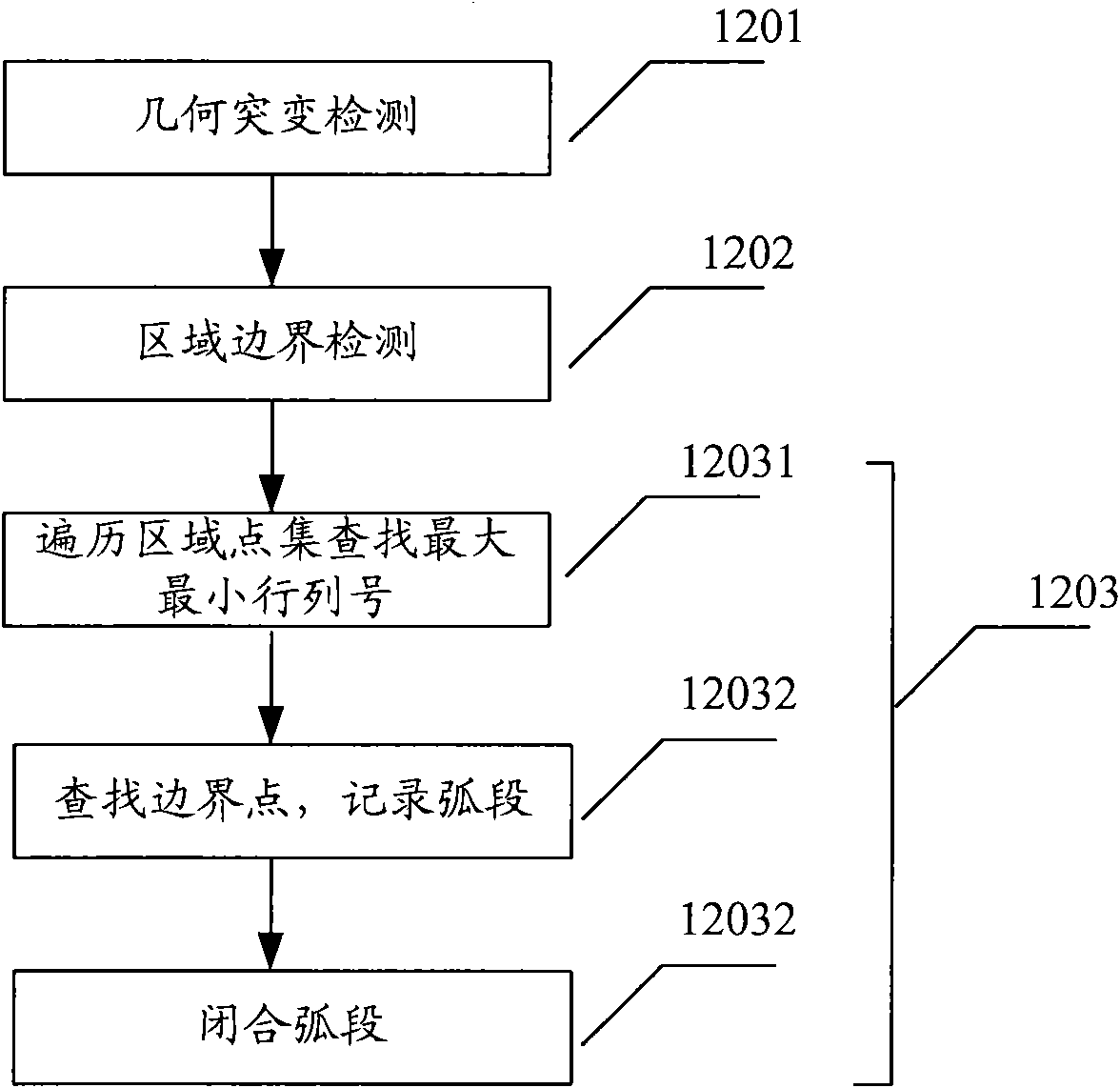
[0046] Step 12, boundary extraction, detects the boundary and geometrical mutation of the functional area.
[0047] Step 13, boundary correction, using the convex decomposition method to correct the boundary, and smoothing, to complete the surface reconstruction of the object.
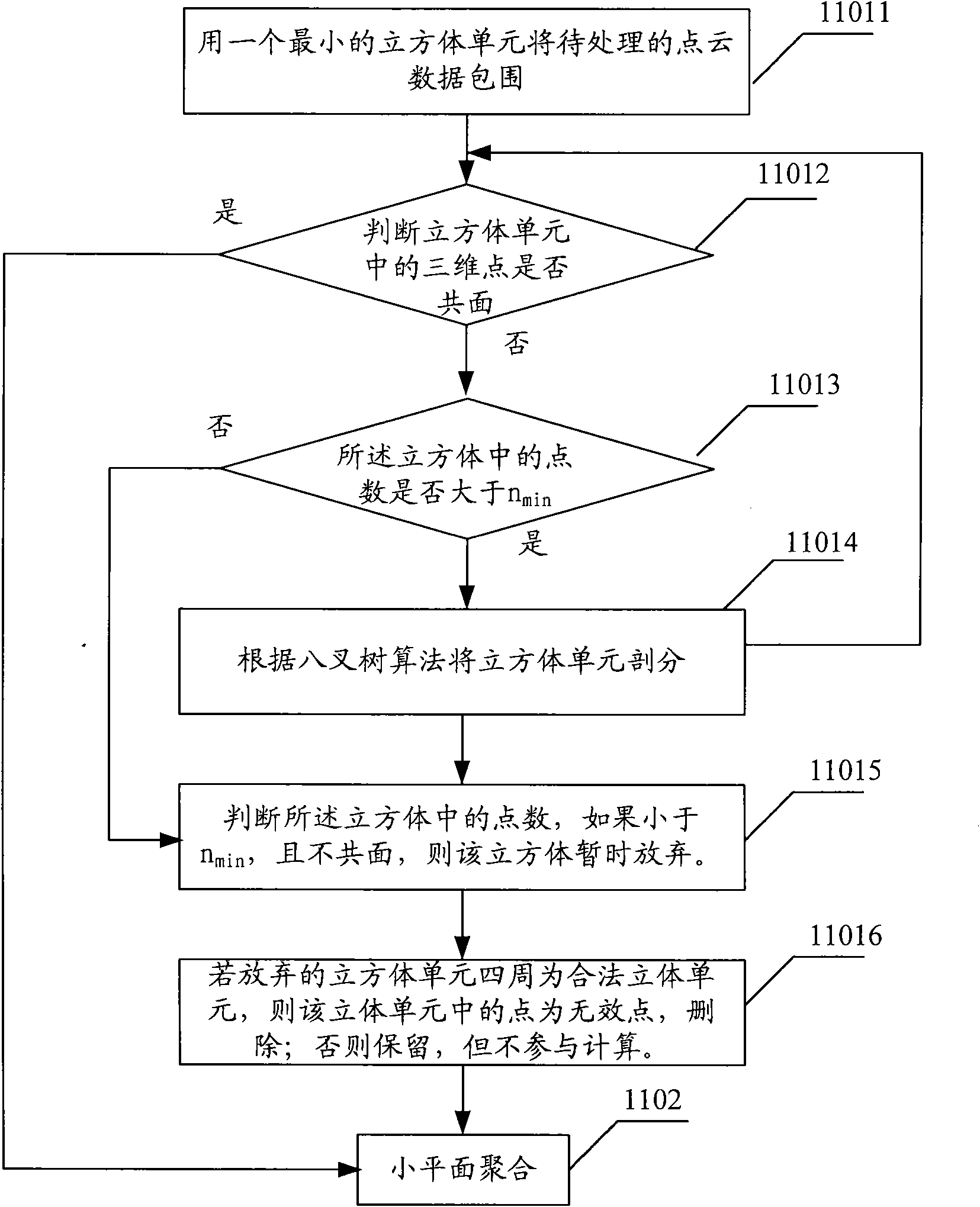
[0048] The region segmentation in the step 11 is to extract functional regions by means of facet segmentation-aggregation. Divide the image into different regions, and let different regions have diff...
Embodiment 2
[0089] Embodiment 2 is used to illustrate the implementation steps when the method of the present invention is applied to point cloud data vectorization of multiple sites. Different from the first embodiment, the step of boundary fusion needs to be added in the second embodiment. Please refer to Figure 5 , including the steps:
[0090] Step 21, area segmentation, extracting functional areas such as walls, doors, and eaves from the 3D laser point cloud data on the object surface.
[0091] Step 22, boundary extraction, detects the boundary and geometrical mutation of the functional area.
[0092] Step 23, boundary fusion, fast fusion of multi-site boundaries to form a vectorized overall description of the object surface.
[0093] Step 24, boundary correction, using the convex decomposition method to correct the boundary, and smoothing, to complete the reconstruction of the object surface.
[0094]Similar to Embodiment 1, the region segmentation in step 21 is to extract func...
Embodiment 3
[0142] Embodiment 3 provides a system for object elevation vectorization of 3D laser scanning data, which is used to implement the method described in Embodiment 1.
[0143] Please refer to Figure 7 , the system includes a laser scanning unit, a region segmentation unit, a boundary extraction unit, a boundary correction unit and a three-dimensional model drawing unit.
[0144] The laser scanning unit obtains the three-dimensional point cloud data of the facade of the object by emitting and receiving laser light.
[0145] The region segmentation unit extracts functional regions, such as walls, doors, eaves, etc., from the acquired 3D point cloud data.
[0146] The region segmentation unit includes a facet segmentation module and a facet aggregation module.
[0147] The facet segmentation module establishes a linear octree-based spatial index for the point cloud data, assigns the point cloud data into cube units, and completes the facet segmentation. All the three-dimensiona...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More