

Cleaning robot and cleaning method thereby
A cleaning robot and non-cleaning technology, applied in the field of robots, can solve the problems of limited power and unsatisfactory cleaning efficiency, and achieve the effect of improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The above invention will be described in detail below in conjunction with specific embodiments and accompanying drawings.
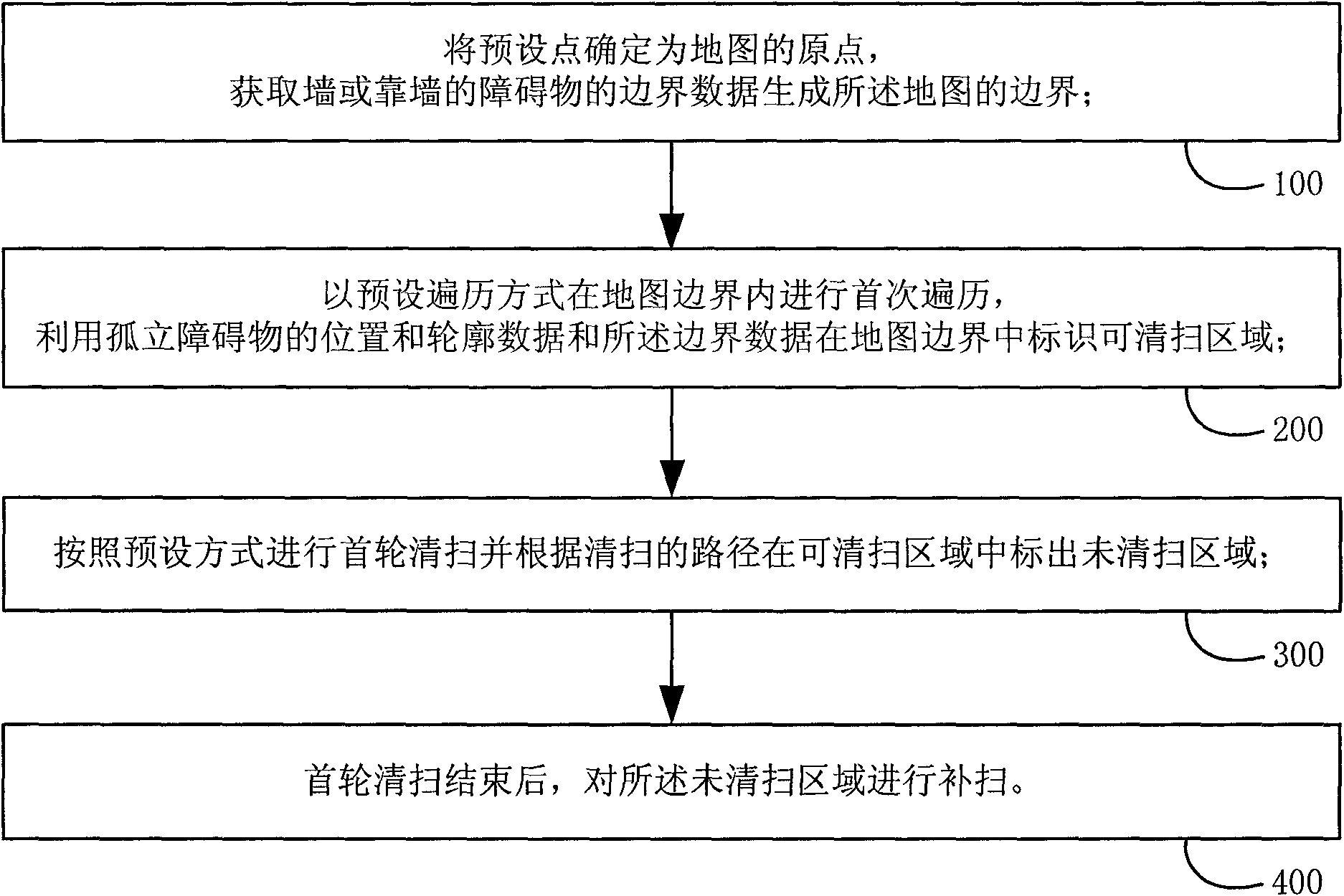
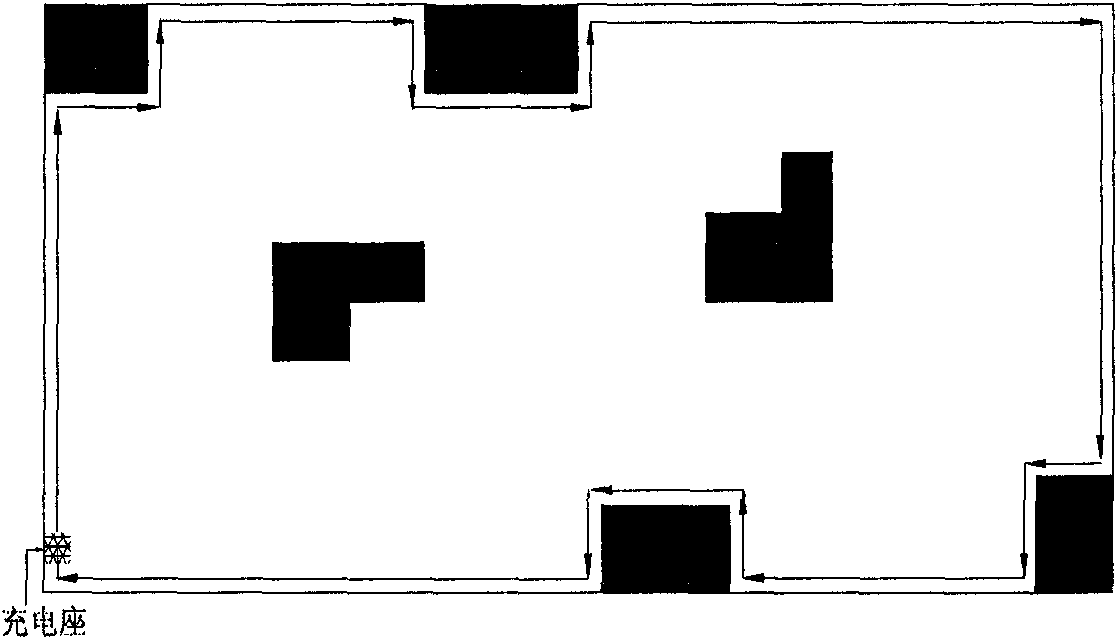
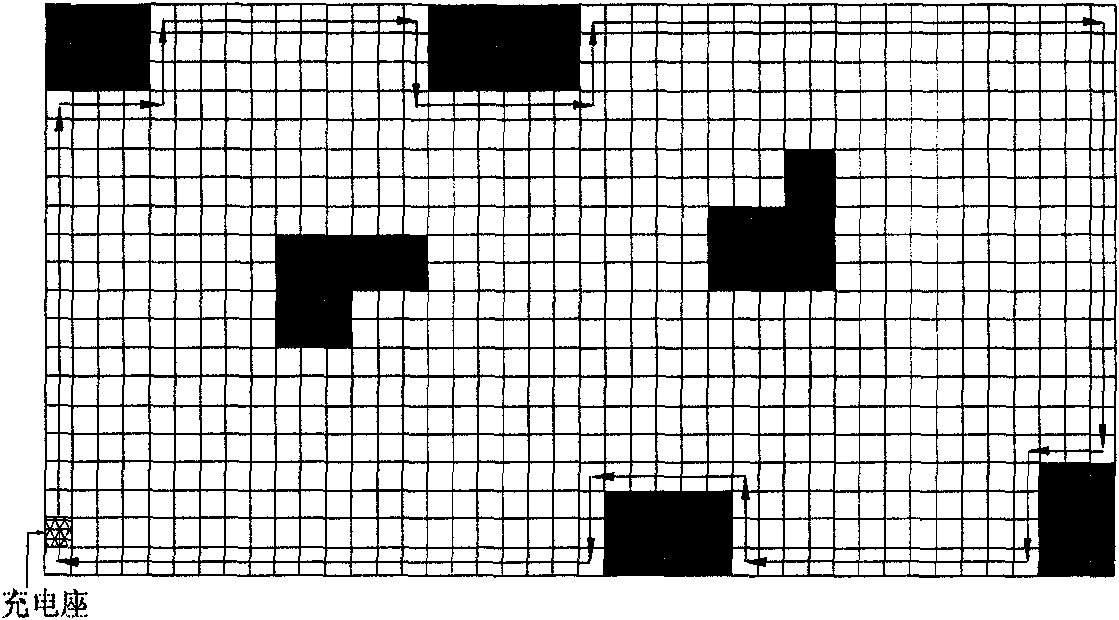
[0029] The cleaning method of the cleaning robot aims to rely on the map information perceived by the cleaning robot to guide cleaning, thereby achieving the purpose of improving cleaning efficiency. In this method, there are two ways to generate the map, one is to generate the map while cleaning, and the other is to generate the map before cleaning. The former is suitable for a certain number of rooms or the scene where the position of obstacles in the room changes. , while the latter is more suitable for long-term cleaning of indoor obstacles and fixed scenes. See figure 1 , the cleaning method of the cleaning robot performs the following steps based on the acquired detection data and current pose data:
[0030] 100. Determining the preset point as the origin of the map, acquiring boundary data of a wall or an obstacle close to the wall to gene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More