Method for remotely and intelligently monitoring animal robot in the open
An animal robot and intelligent monitoring technology, applied in the direction of reducing energy consumption, service based on location information, advanced technology, etc., can solve the problems that animal robots are not suitable for field monitoring, the master control equipment and the controlled equipment have high requirements, and achieve Extensive economic and social benefits, flexible control methods, and low power effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0022] Implementation Mode 1: The user uses the desktop control terminal to control
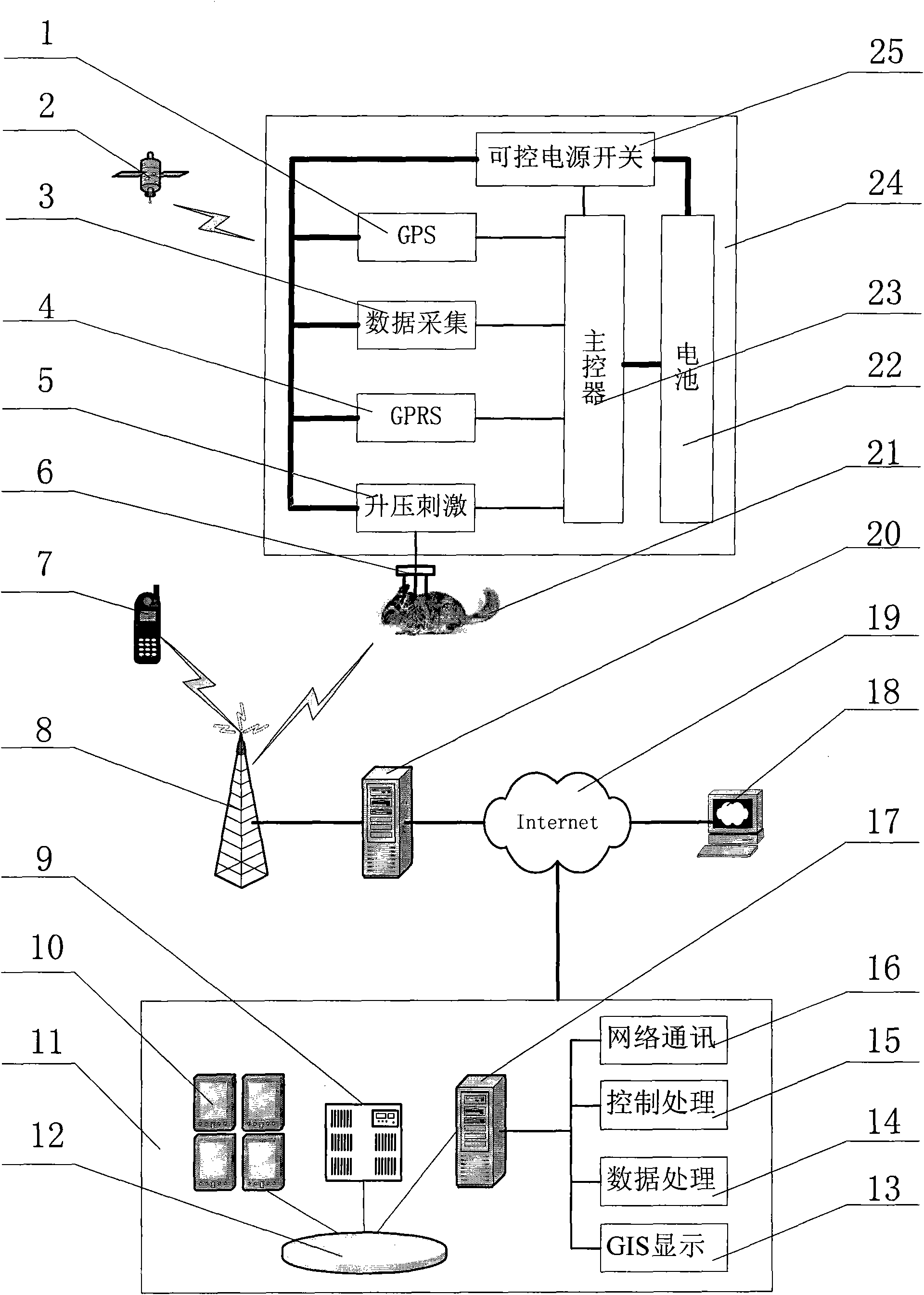
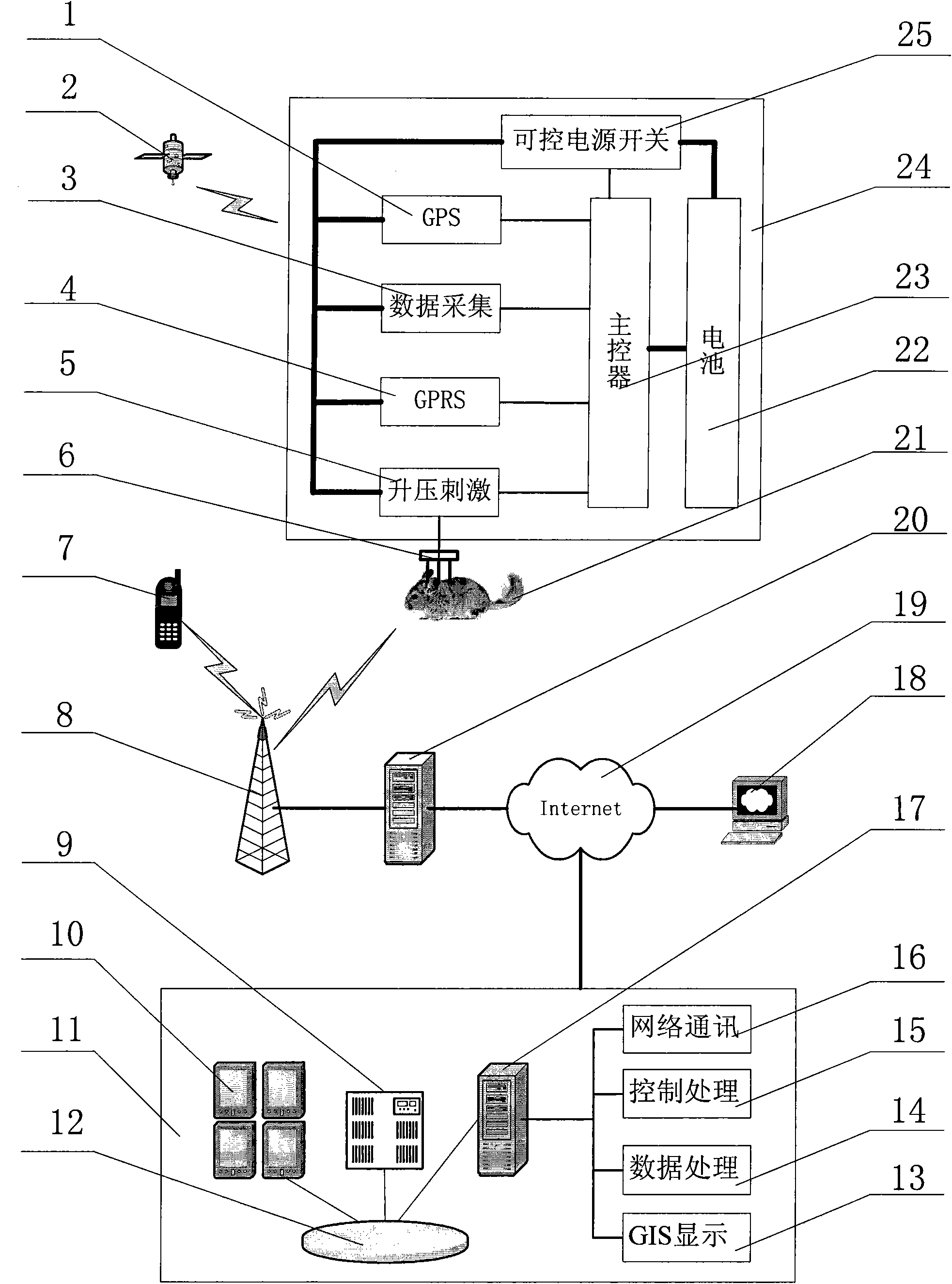
[0023] With reference to accompanying drawing 1, the user sends control instruction to the monitoring server [17] of monitoring center [11] through desktop control terminal [18] and Internet network [19]. The monitoring server [17] temporarily stores the control command after receiving it, and waits for the arrival of the data collected by the animal robot [21]. When the knapsack [24] work timing time of animal robot [21] arrives, then main controller [23] is awakened, and its control controllable power switch [25] is each module power supply of knapsack [24]. The GPS[1] module obtains positioning data through global positioning satellites[2]. The data acquisition [3] module obtains the detected ambient temperature data. The GPRS[4] module sends the positioning and collection data to the base station[8], and after being processed by the GPRS gateway server[20], it is transmitted to the moni...
Embodiment approach 2
[0024] Embodiment 2: The user uses a handheld control terminal to control
[0025] With reference to accompanying drawing 1, the user is passed to monitoring server [17] by Internet network [19] after GPRS gateway server [20] is processed by hand-held control terminal [7]. The monitoring server [17] temporarily stores the control command after receiving it, and waits for the arrival of the data collected by the animal robot [21]. When the knapsack [24] work timing time of animal robot [21] arrives, then main controller [23] is awakened, and its control controllable power switch [25] is each module power supply of knapsack [24]. The GPS[1] module obtains positioning data through global positioning satellites[2]. The data acquisition [3] module obtains the detected ambient temperature data. The GPRS[4] module sends the positioning and collection data to the base station[8], and after being processed by the GPRS gateway server[20], it is transmitted to the monitoring server[17]...
Embodiment approach 3
[0026] Implementation Mode 3: No Control Instruction Mode
[0027] When the knapsack [24] work timing time of animal robot [21] arrives, then main controller [23] is awakened, and its control controllable power switch [25] is each module power supply of knapsack [24]. The GPS[1] module obtains positioning data through global positioning satellites[2]. The data acquisition [3] module obtains the detected ambient temperature data. The GPRS[4] module sends the positioning and collection data to the base station[8], and after being processed by the GPRS gateway server[20], it is transmitted to the monitoring server[17] of the monitoring center[11] through the Internet network[19]. At this time, the monitoring server [17] sends the received positioning information and collected data to the large screen [10] through the Ethernet bus [12], displays them in the form of an electronic map, and stores the relevant data in the mass storage device [9]. ]middle. The knapsack [24] of anim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More