

Monocular visual positioning method based on inverse perspective projection transformation
A technology of projection transformation and positioning method, applied in the direction of photo interpretation, etc., can solve the problems of difficult extraction of feature points, large measurement errors of algorithms, and no consideration of cameras, so as to avoid large calculation errors, improve positioning accuracy, and eliminate perspective. effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
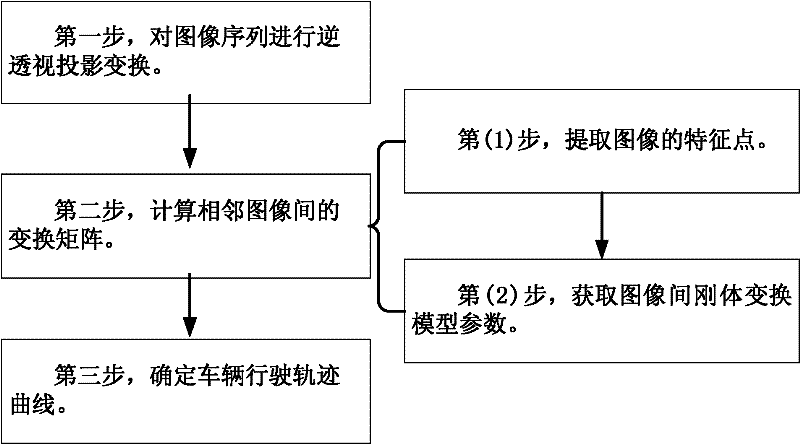
[0034] figure 1A flow chart of the specific implementation of the present invention is given. In the first step, an inverse perspective projection transformation is performed on the image sequence. In this step, for the method of solving the camera internal parameter matrix and the camera external parameter matrix, refer to pages 22 to 33 of the book "Principles and Applications of Photogrammetry" (published by Science Press, written by Yu Qifeng / Shang Yang). In the second step, the transformation matrix between adjacent images is calculated. Among them, step (1) is to extract feature points. In this step, the feature detection operator used is the SURF operator. For the properties and usage of the SURF feature operator, refer to the document "Distinctive image features from scale invariant key points" (Journal: International Journal of Computer Vision, 2004, 60( 2), page number 91-110, author David G.Lowe) and literature "SURF: Speeded up robust features" (Conference: Proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More