

Simulation Method of Soft Tissue Deformation Based on Meshless Galerkin and Particle Spring Coupling
A technology of particle springs and simulation methods, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems that are not suitable for large-scale solutions, and achieve improved deformation simulation efficiency, good smoothness, high stability and The effect of computational precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
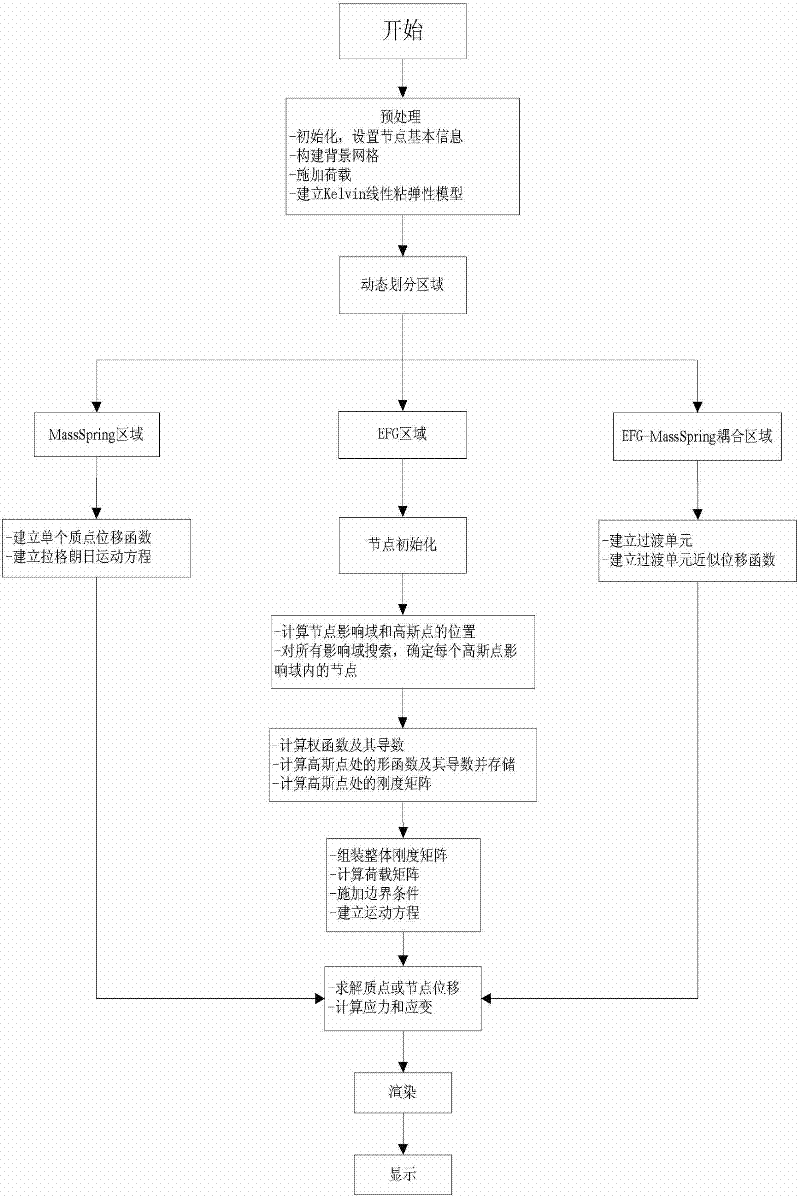
[0045] Embodiment one: see figure 1 , the present invention is based on a soft tissue deformation simulation method coupled with meshless Galerkin and particle springs, including three parts: a pre-processing process, a calculation deformation process, and a post-processing process:
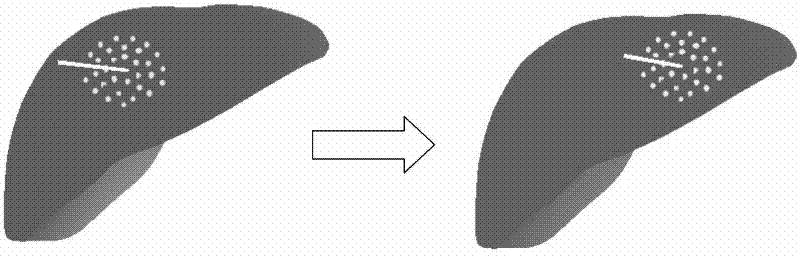
[0046] During preprocessing, a linear viscoelastic biomechanical model is established for soft tissue. Assuming that the soft tissue is a homogeneous and isotropic material with quasi-incompressibility and linear viscoelastic characteristics, construct constitutive equations, geometric equations and equilibrium equations, and impose boundary conditions and initial conditions;
[0047] In the process of calculating the deformation, according to the load carried by the soft tissue, the mesh-free region and the mass-point spring region are dynamically divided, and a transition element is established in the connection region between the mesh-free region and the mass-point spring region, and the appro...
Embodiment 2
[0049] Embodiment 2: This embodiment is based on a soft tissue deformation simulation method coupled with meshless Galerkin and particle springs. The difference from Embodiment 1 is that the process of calculating deformation specifically includes the following four steps:
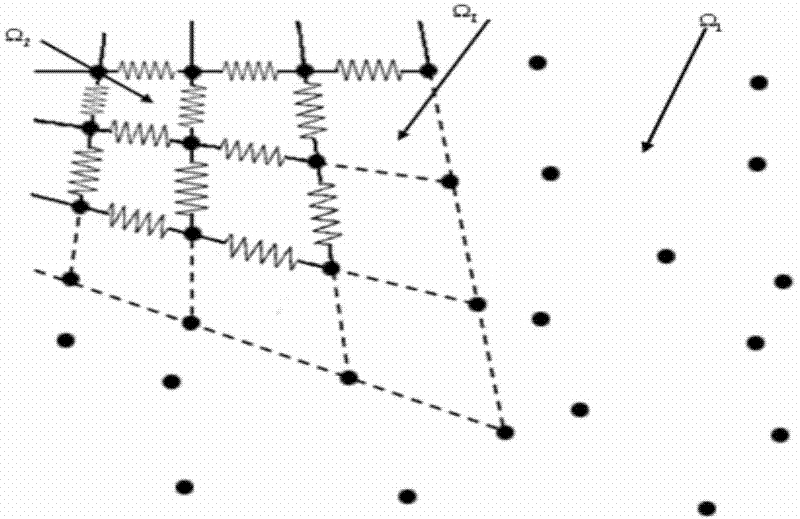
[0050] 1) The function between the design load and the distance is used as the basis for dividing the mesh-free region, and the mesh-free region is large enough to ensure that the discontinuous boundaries are all in the mesh-free region, and other regions are particle spring regions;
[0051] 2) For the meshless area and the particle spring area, respectively establish an effective data structure and classify and manage data;
[0052] 3) Establish a transition unit in the connection region between the mesh-free region and the particle spring region;
[0053] 4) Establish the transition node and the approximate displacement function of the transition node in the transition element to realize the smooth tran...
Embodiment 3
[0054] Embodiment 3: This embodiment is based on the soft tissue deformation simulation method coupled with meshless Galerkin and particle springs. The difference from Embodiment 2 is that a transition unit is established in the connection region between the meshless region and the particle spring region. It includes the following two steps: 1) The divided meshless area and the mass spring area are regarded as two entities, and the contact part of the two entities is used as the transition boundary. On the basis of the background grid, the background mesh at the transition boundary is subdivided The lattice is used as a sub-unit, so that there is at most one node or particle in each sub-unit, and the unit that does not contain nodes or particles is used as an empty sub-unit;
[0055] 2) Take the empty subunit as the search object, search for subunits in the six directions of up, down, left, right, front and back, and after iteration, gradually convert the empty subunits that me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More