

Variable structure control method of wheeled mobile robot
A mobile robot and variable structure control technology, applied in two-dimensional position/channel control, etc., to achieve the effect of improving control performance, improving control quality, and improving control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
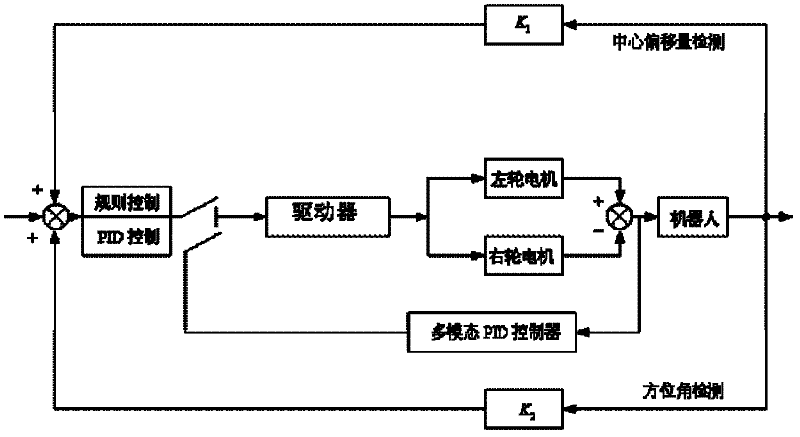
[0078] The variable structure control method of the wheeled mobile robot provided by the present invention, the wheeled mobile robot includes a left wheel, a right wheel, a driver, a front row of magnetic sensors, a rear row of magnetic sensors, a wheeled mobile robot body, an RFID reader, The driver controls the motor speed, including straight-line walking control and turning control. The straight-line walking control controls the robot to move in a straight line and corrects the forward direction of the robot according to the difference information between the left wheel and the right wheel drive motor of the robot; the turning control, according to The RFID tag provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More