

A polydactyly underactuated end effector with sensation
An end-effector, under-actuated technology, applied in agricultural machinery and implements, picking machines, applications, etc., can solve the problems of surface damage of fruits and vegetables, easy-to-damage fruits, poor versatility, etc., and achieves a small number of drives and strong versatility. , control simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
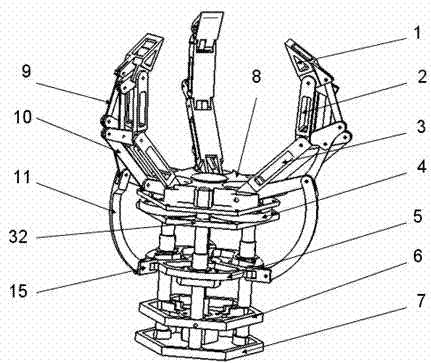
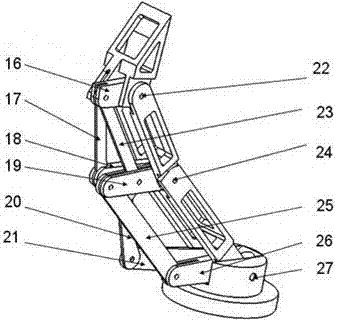
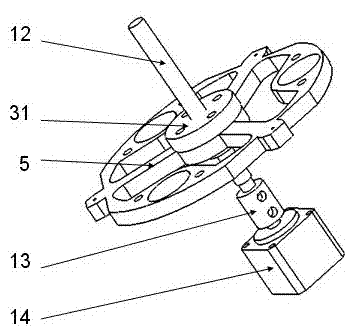
[0024] like figure 1 As shown, the present invention includes three fingers with the same structure, a base and a palm part; the first phalanx 1 of each finger part is hinged with the second phalanx 2, the second phalanx 2 is hinged with the third phalanx 3, and the second phalanx 2 is hinged with the third phalanx 3. The three knuckles 3 are hinged with the finger turntable 4; the motor 14 of the base part drives the moving plate 5 to move up and down through the shaft coupling and the leading screw; the connecting plate on the palm of the palm and the connecting plate under the palm are coaxially connected by pins; The third knuckles of the three fingers are connected with the moving plate 5 through coupling rods 11 respectively, the third knuckles of the three fingers are connected with the palm through the finger turntable 4, and the base and the pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More