

A Submersible Pump Water Jet Propulsion Cable Remote Control Underwater Robot
An underwater robot and water-jet propulsion technology, which is applied in ship propulsion, propulsion components, underwater operation equipment, etc., can solve the problem of increasing the complexity of the design of the robot control system and the difficulty and risk of the user's operation, and the failure of the drive motor to work normally. It is difficult to have attitude stability and other problems, so as to reduce the difficulty of design, reduce the risk of water leakage, and stabilize the underwater working performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the scope described in the embodiments.
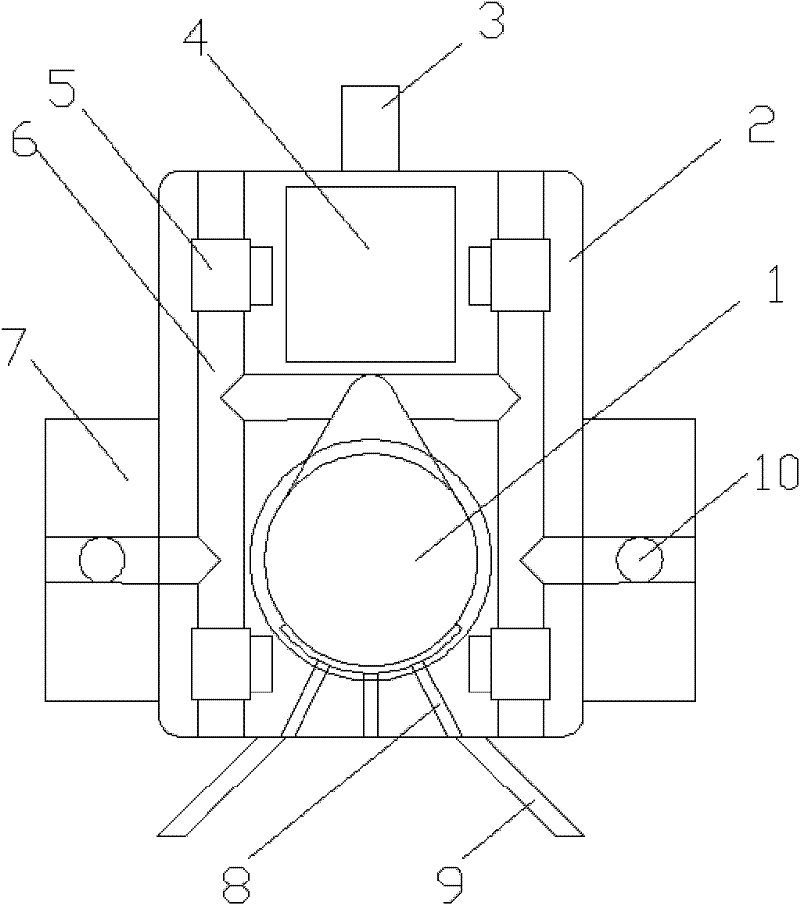
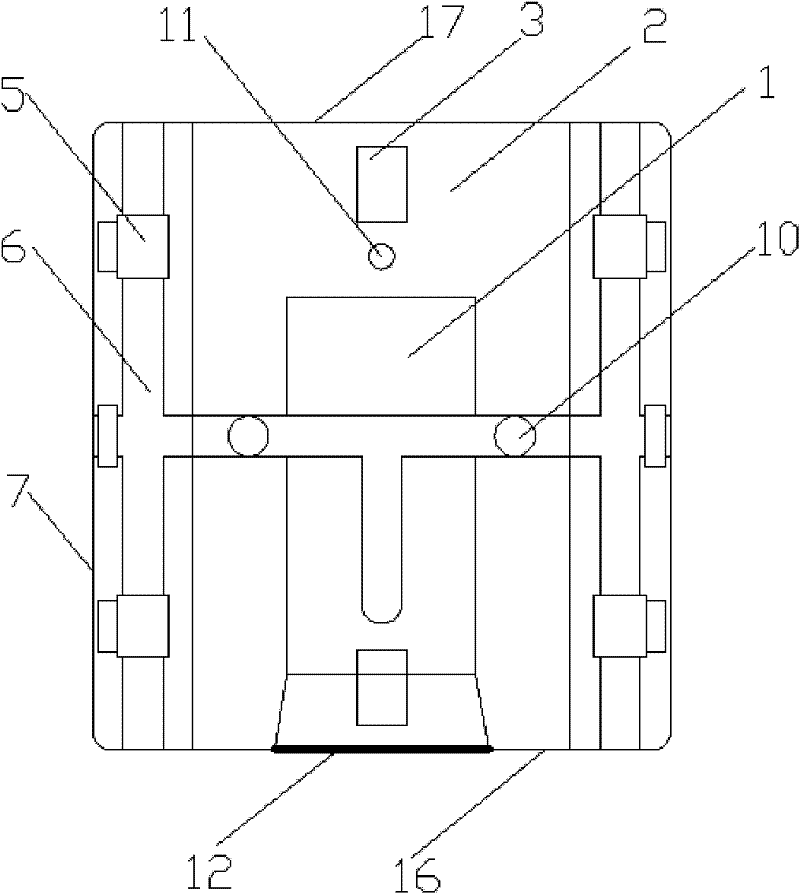
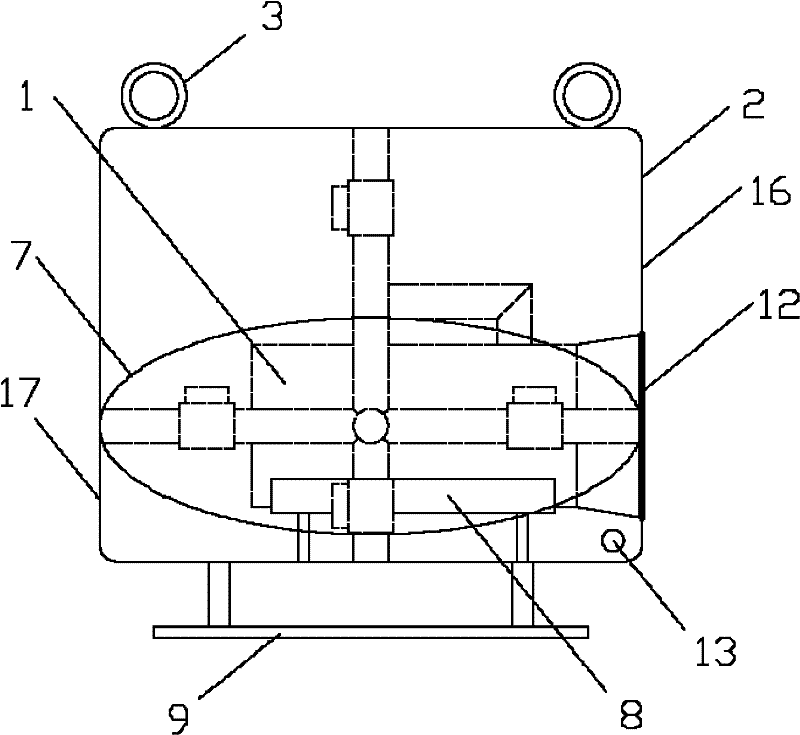
[0029] For ease of description, in Figure 1-8 Among them, the direction from the rear baffle 17 to the front baffle 16 is defined as the forward direction, the vertical symmetry plane of the robot along this direction is the vertical longitudinal section, the right side of the forward direction is the right direction, the left side is the left direction, and the upper side is the upward direction, the lower side is the downward direction, and the left, right, upper and lower baffles on the main cavity 2 are respectively the left baffle, the right baffle, the upper baffle and the lower baffle.
[0030] Such as Figure 1~3 As shown, a submersible pump water jet propulsion cable remote control underwater robot includes a main cavity 2, a submersible pump 1, a wate...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More