

A ground test method for star sensor
A star sensor and ground testing technology, applied in the field of space science, can solve the problems of inability to assess the optical system, inability to test the polarity of the sensor, inability to test the accuracy of the star sensor, etc., and achieve the effect of simple testing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] Example 1: Combining Figure 4 , the ground test method of a kind of star sensor of the present invention, the steps are as follows:
[0037] Step 1: Place the star sensor in a sky area suitable for stargazing;
[0038] Step 2: Use the theodolite to adjust the star sensor so that the Z axis of the star sensor points to the true north and the Y axis vertically faces the zenith;
[0039] Step 3: Connect the star sensor power supply and communication interface, and turn on the star sensor power supply;
[0040] Step 4: Receive the quaternion of the star sensor in the inertial coordinate system;
[0041] Step 5: Read the local time;
[0042] Step 6: According to the local time, transfer the attitude of the star sensor to the quaternion in the WGS84 coordinate system;
[0043] Step 7: Read the local longitude and latitude;
[0044] Step 8: Convert the quaternion in the WGS84 coordinate system of the star sensor into three-axis Euler angles;
[0045] Step 9: Calculate t...
Embodiment 2
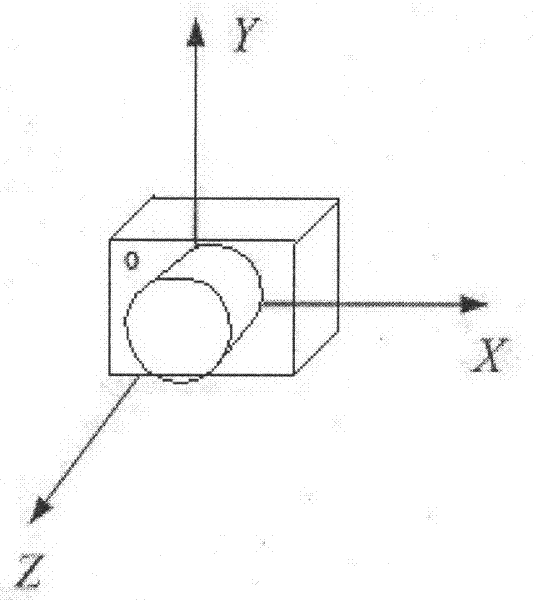
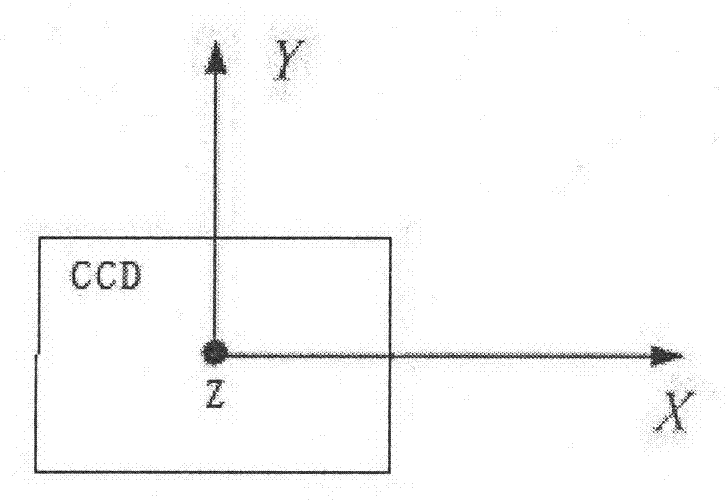
[0055] Example 2: Combining figure 2 ,, image 3 , define the star sensor image space coordinate system as (such as figure 2 ): The origin O is located at the center of the star sensor sensor (CCD), facing the star sensor lens, the X axis is parallel to the CCD plane to the right, the Y axis is parallel to the CCD plane upward, and the Z axis is vertical to the CCD face outward. That is to say, the polarity of the star sensor is (such as image 3 ):
[0056] Suppose the attitude angle of the star sensor rotating around the X axis is called the yaw angle, the attitude angle around the Y axis is called the pitch angle, and the attitude angle around the Z axis is called the roll angle.
[0057] The star sensor output attitude is the relationship between the star sensor image space coordinate system and the earth center inertial coordinate system (ie J2000.0 coordinate system), that is to say, the yaw angle output by the star sensor and the direction the optical axis The dec...
Embodiment 3
[0080] Example 3: Binding Figure 5-Figure 8 , Star sensor main performance indicators: field of view: 12 ° × 9 °; area array: 670 × 520; detection magnitude: 6Mv; data update rate: 8Hz.
[0081] Select a certain type of star sensor and a certain type of manual three-axis turntable. Before the experiment, use high-precision GPS to measure the local longitude of 121.10481° east longitude and 31.15025° north latitude, and install the star sensor on the manual turntable. , adjust the turntable so that the Z-axis of the star sensor points to true north, and the Y-axis vertically faces the zenith. Turn on the star sensor, the host computer receives the attitude quaternion of the star sensor in the J2000.0 coordinate system and the time of shooting the image, and the host computer software calculates the attitude of the star sensor in the J2000.0 coordinate system according to the time of shooting the image Convert the quaternion to the quaternion in the WGS84 coordinate system, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More