Multi-joint manipulator device and endoscope system having the same
一种机械手、多关节的技术,应用在内窥镜、机械手、程序控制机械手等方向,能够解决繁杂等问题,达到避免损伤的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
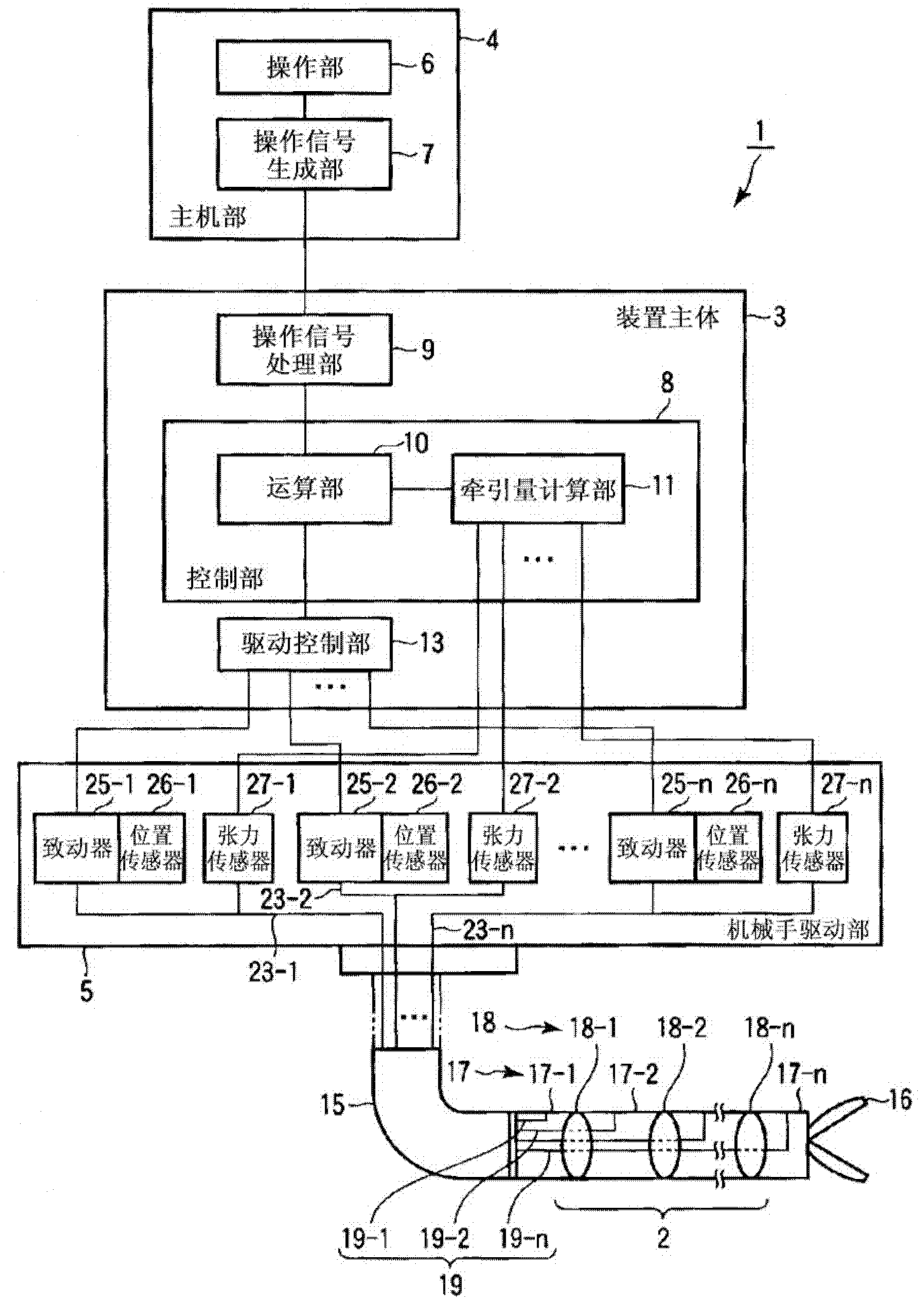
[0025] First, a first embodiment of the present invention will be described with reference to the drawings. The articulated manipulator 1 of the present embodiment is a master-slave device. like figure 1 As shown, the multi-joint manipulator device 1 generally has: a multi-joint manipulator 2; a device main body 3, which performs drive control of the multi-joint manipulator 2; a main unit 4, which generates an operation signal corresponding to the user's operation amount; and a manipulator drive unit 5 , which drives the multi-joint manipulator 2 .
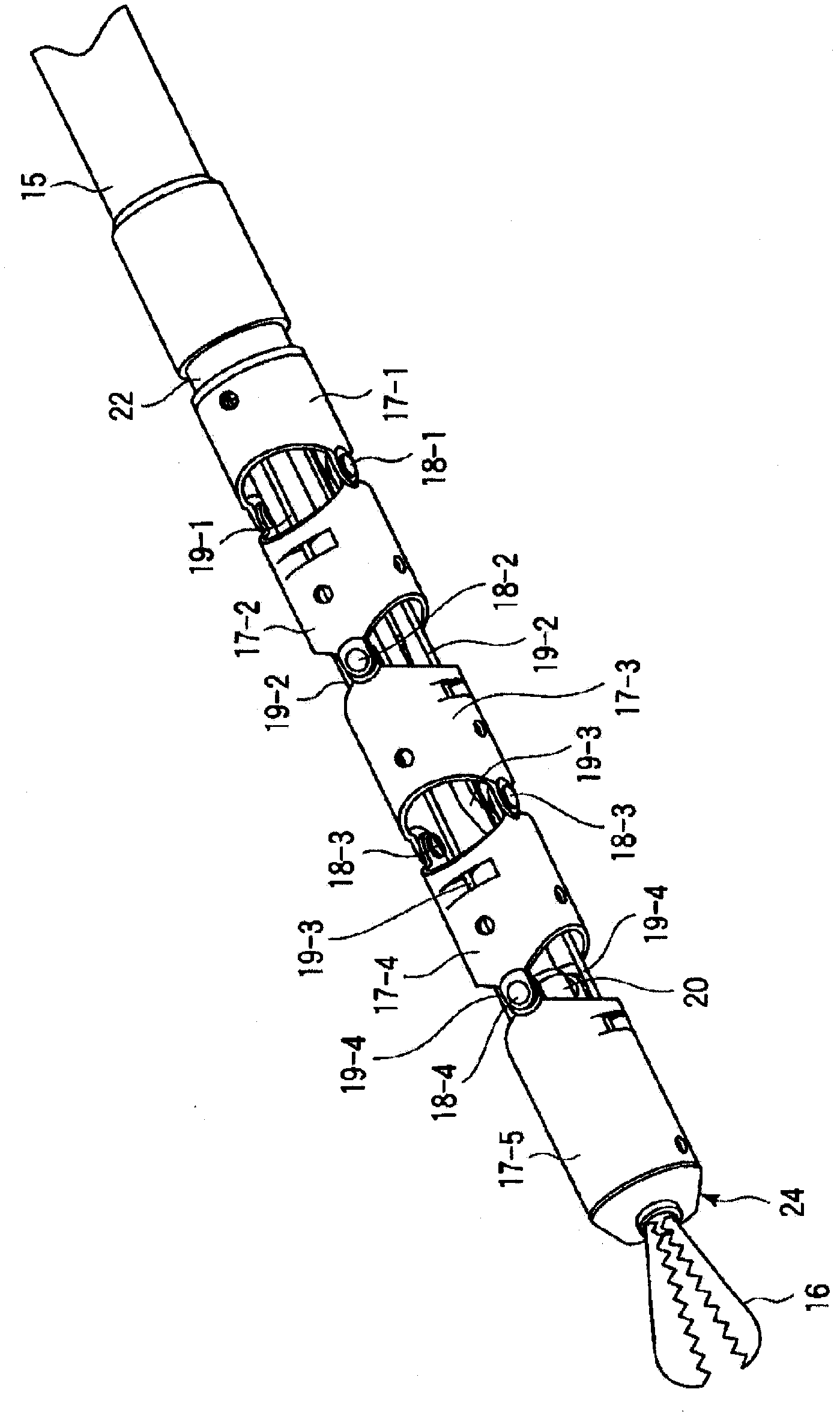
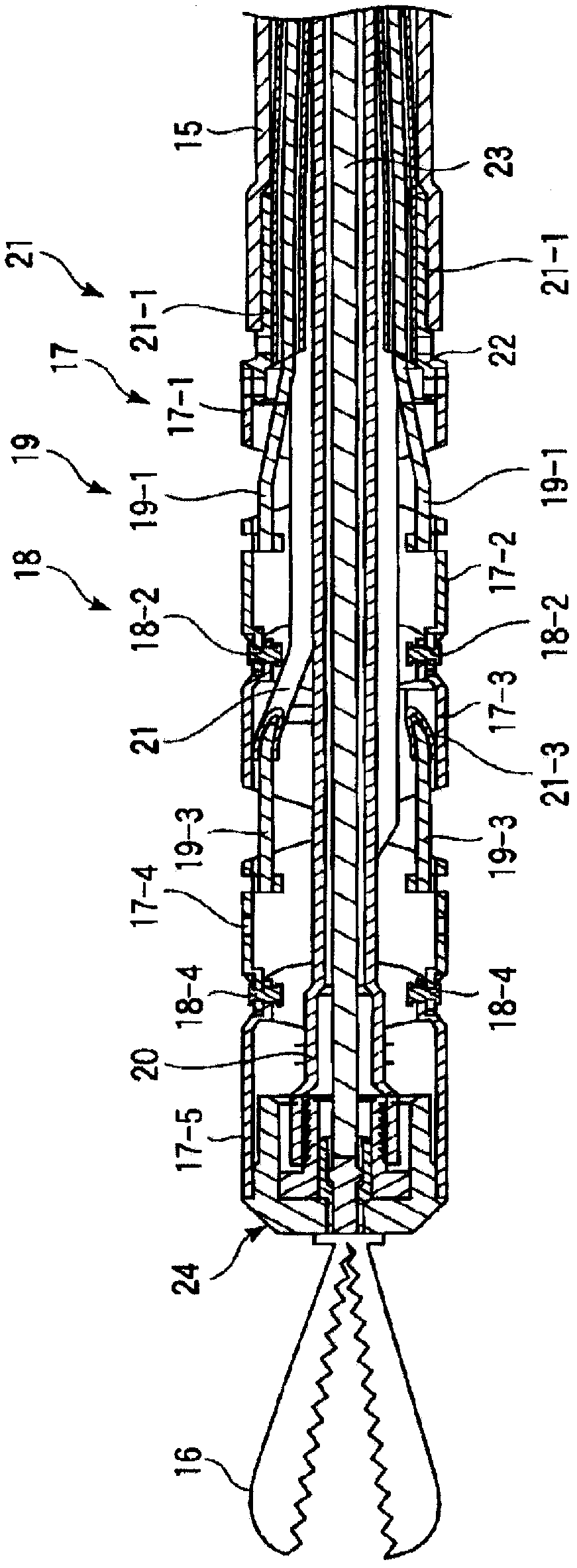
[0026] Figure 2A An outline of the appearance of the articulated manipulator 2 is shown, Figure 2B The outline of the cross-section is shown. As shown in these figures, the multi-joint manipulator 2 has a gripping portion 16, a plurality of cylindrical bending pieces 17 (17-1, 17-2, ..., 17-n), and a plurality of rivet-shaped shafts. Components 18 (18-1, 18-2, ..., 18-n), multiple lines (or angled lines) 19 (19-1, 19-2, ......
no. 2 Embodiment approach
[0072] Next, a second embodiment will be described with reference to the drawings. This embodiment is an embodiment in which the multi-joint manipulator device of the first embodiment is applied to the bending drive of the bending portion of the endoscope main body and the treatment instrument arranged in the endoscope in the endoscope system. department.
[0073] Figure 5 A configuration example in which an endoscope system 31 according to the present embodiment is installed in an operating room is shown. In the center of the operating room, an operating table 32 on which the subject lies on his back is arranged. A diagnosis / treatment device 33 for diagnosing and treating a lesion in a body cavity, and an operating device 34 of the diagnosis / treatment device 33 are disposed near the operating table 32 . An endoscope control device 35 and a treatment instrument control device 36 are disposed near the opposite side of the operating table 32 so as to face them.
[0074] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com