Torque coordination control method of hybrid electric vehicle engine and motor
A hybrid vehicle, motor torque technology, applied in hybrid vehicles, motor vehicles, transportation and packaging, etc., to achieve the effect of improving driving comfort and power, improving economy, and increasing response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
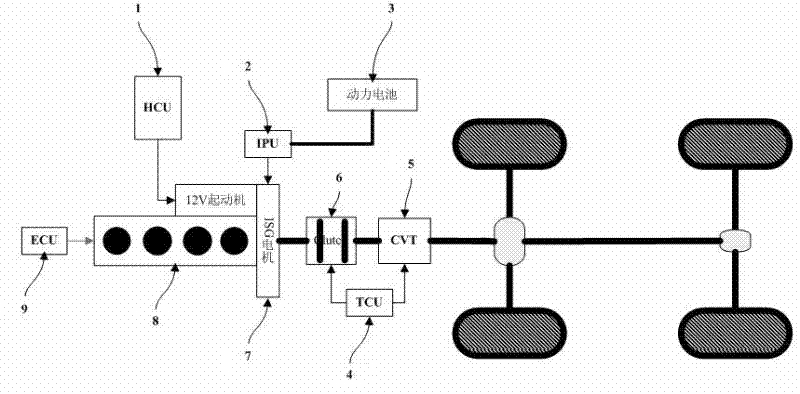
[0040] figure 1 Shown is a parallel hybrid power system, which includes vehicle controller HCU 1, ISG motor controller IPU2, power battery 3, transmission controller TCU4, continuously variable transmission CVT5, clutch 6, ISG motor 7 (hereinafter referred to as motor), engine 8 , engine controller ECU9.
[0041] The method of the present invention uses the vehicle controller HCU1 as a carrier, and is realized through a parallel hybrid power system including this control method. The following five different situations are combined. Figure 7 The technical implementation process of the present invention will be described.
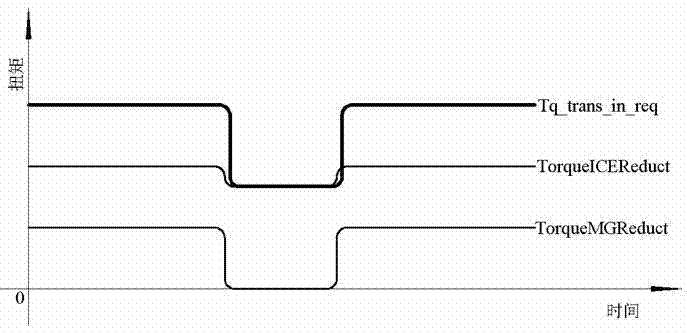
[0042]Motor assist case 1 (see figure 2 ):
[0043] 1) The vehicle drives to a certain state, the driver's demand torque Tq_drv_req=160Nm, Tq_boost=120Nm, Tq_drv_req> Tq_boost, needs the motor to assist, the vehicle controller HCU1 distributes the target torque to the engine as Tq_ice_req=120Nm, and distributes it to the motor target torque Tq_mg_req=40...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More