

Cable robot driving carrier
A robot and cable technology, applied in the field of cable robot drive carrier, can solve the problems of unpopular use of the drive carrier, danger of high-altitude installation, complicated control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
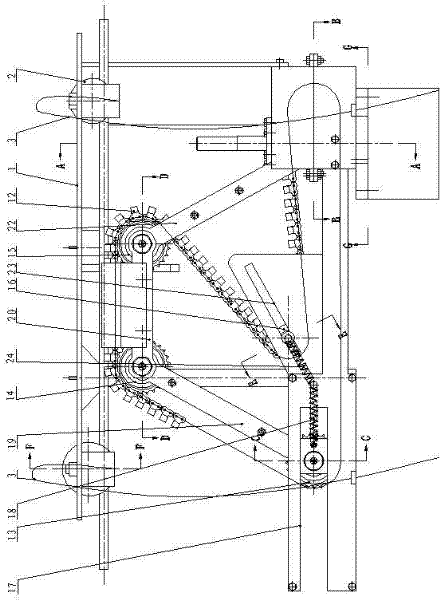
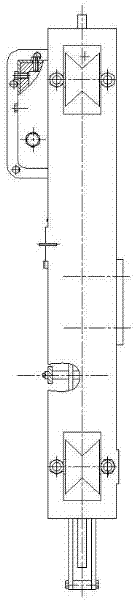
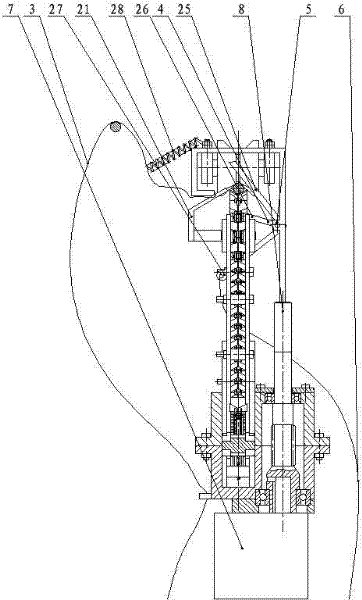
[0029] The cable robot drives the carrier, and its composition includes: frame 1, walking auxiliary wheel 2 is installed on the frame, the installation rope 3 is connected to the frame, and the dismounting combination rod 4 is connected to the frame through a hinge Above, the torsion spring 5 is connected between the disassembly combination lever and the frame, the disassembly combination lever is connected with the disassembly rope 6, the drive motor 7 is connected under the frame, and the power of the drive motor The output shaft is connected with the worm 8, and the worm is connected with the worm wheel 9, and the worm wheel is installed on the drive shaft 10, and the drive shaft is connected with the rod chain combination. During use, the installation rope 3 is straddled by the model airplane, and then the installation rope 3 is pulled on the ground to complete the installation of the drive carrier. The drive motor 7 drives the worm 8 to rotate, so that the worm wheel 9 r...
Embodiment 2
[0031] The cable robot drives the carrier, the rod-chain combination includes a driving sprocket 11 installed on the drive shaft, and the driving sprocket is connected to the sliding sprocket 13 and the rear driven sprocket sequentially through a chain 12 14. The front driven sprocket 15 and the compression sprocket 16, the sliding sprocket is installed on the horizontal slideway 17 under the frame and connected with the frame through a rear tension spring 18, A strut 19 is connected between the sliding sprocket and the rear driven sprocket, a connecting rod 20 is connected between the rear driven sprocket and the front driven sprocket, and the connecting rod is connected to the stopper. Plate 21, a swing bar 22 is connected between the front driven sprocket and the frame, and the compression sprocket is installed on the inclined slideway 23 below the frame and is connected with the frame. Connect by front extension spring 24 between the frames. The sliding sprocket is pull...
Embodiment 3
[0033] The cable robot drives the carrier, and the disassembly assembly rod has a cable lever fork 25, a rod chain lever fork 26, and a disassembly pull rod fork 27 connected by the disassembly rope. When dismounting the drive carrier, pull the dismounting rope to make the dismounting pull bar 27 drive the dismounting combination lever to rotate. Out of the cable at the predetermined position, slowly put down the drive carrier to complete the disassembly, and the disassembly combination lever 4 is reset by the reset torsion spring 5.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More