

Multi-motor proportional synchronization control algorithm based on improved adjacent cross coupling
A cross-coupling and synchronous control technology, applied in the direction of speed regulation of multiple motors, complex mathematical operations, etc., can solve the problems of complex and difficult algorithm design, and achieve the goal of overcoming time-varying parameters, eliminating steady-state errors, and achieving high synchronous control accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
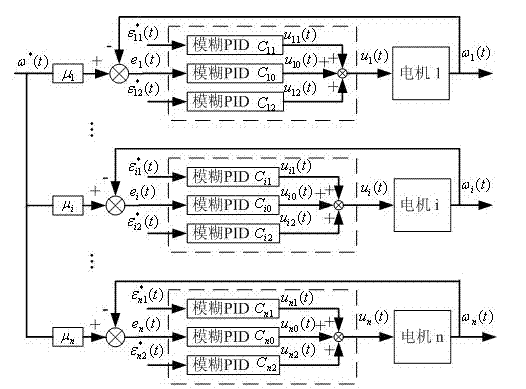
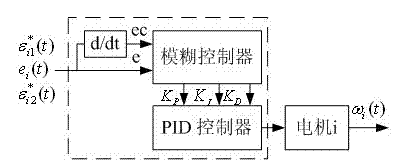
[0015] The present invention is a multi-motor proportional synchronous control algorithm based on improved adjacent cross-coupling. On the basis of improving the adjacent cross-coupling control structure, a fuzzy PID controller is added. The steps are as follows:
[0016] Step 1: Define the parameters in the adjacent cross-coupling control structure. The basic idea of the adjacent cross-coupling control structure is that when controlling each motor, only the states of itself and two adjacent motors are considered, which will greatly Simplify the control structure; on this basis, improve the adjacent cross-coupling control structure, divide the multi-motor synchronous system into n synchronous subsystems, define the control parameters of each synchronous subsystem in the adjacent cross-coupling control structure, and increase After the proportional link is established, the control parameters of each synchronization subsystem are redefined, and the relational equations of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More