

Monocular vision/inertia autonomous navigation method for indoor environment
A technology of monocular vision and autonomous navigation, which is applied in the field of visual navigation, inertial navigation, and navigation. It can solve the problems of inaccurate matching results and insufficient robustness, and achieve the effects of simplifying algorithms, improving reliability, and safe and effective autonomous navigation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
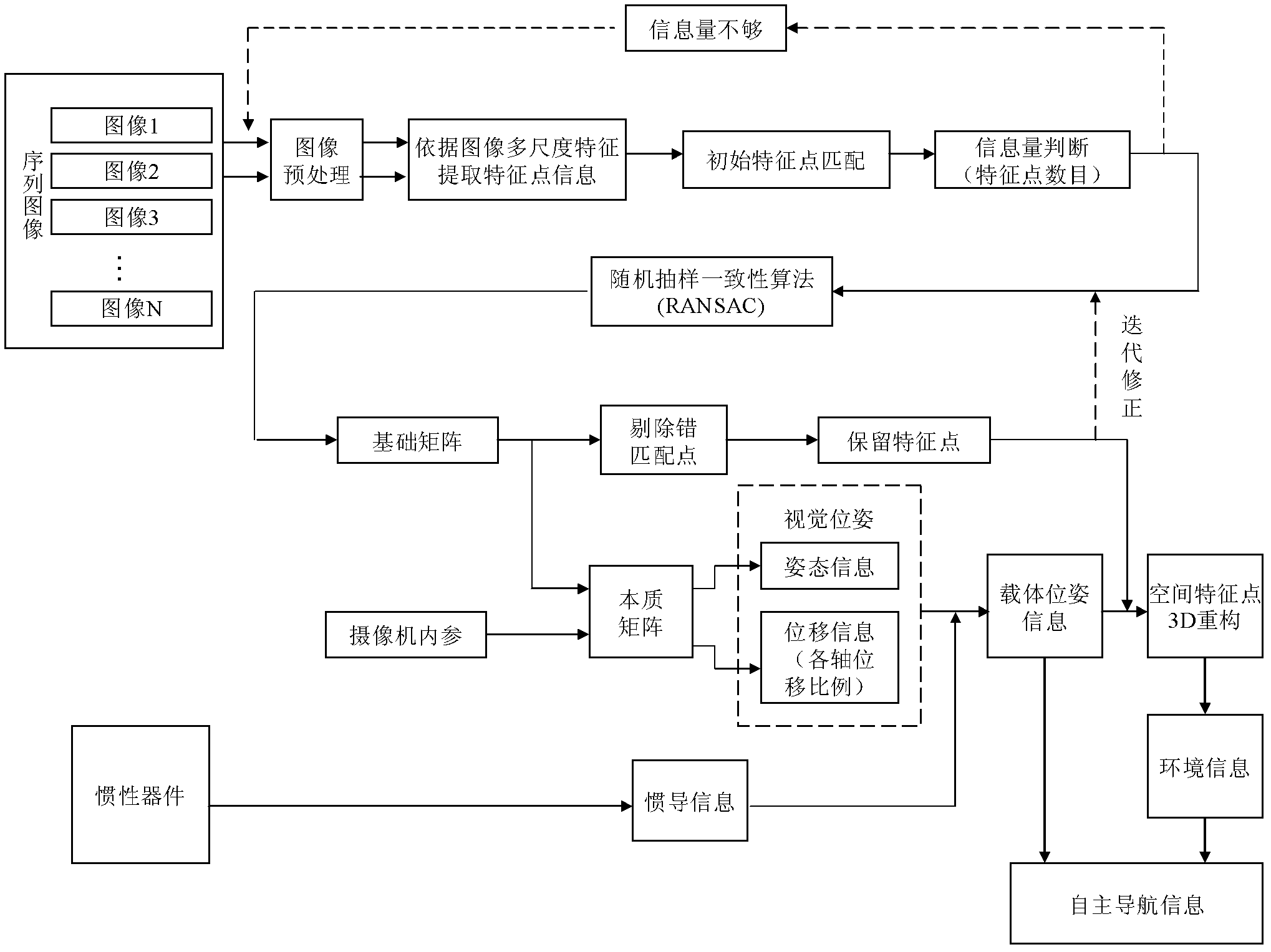
[0023] The method process of the present invention is as figure 1 As shown, it mainly includes the following steps:
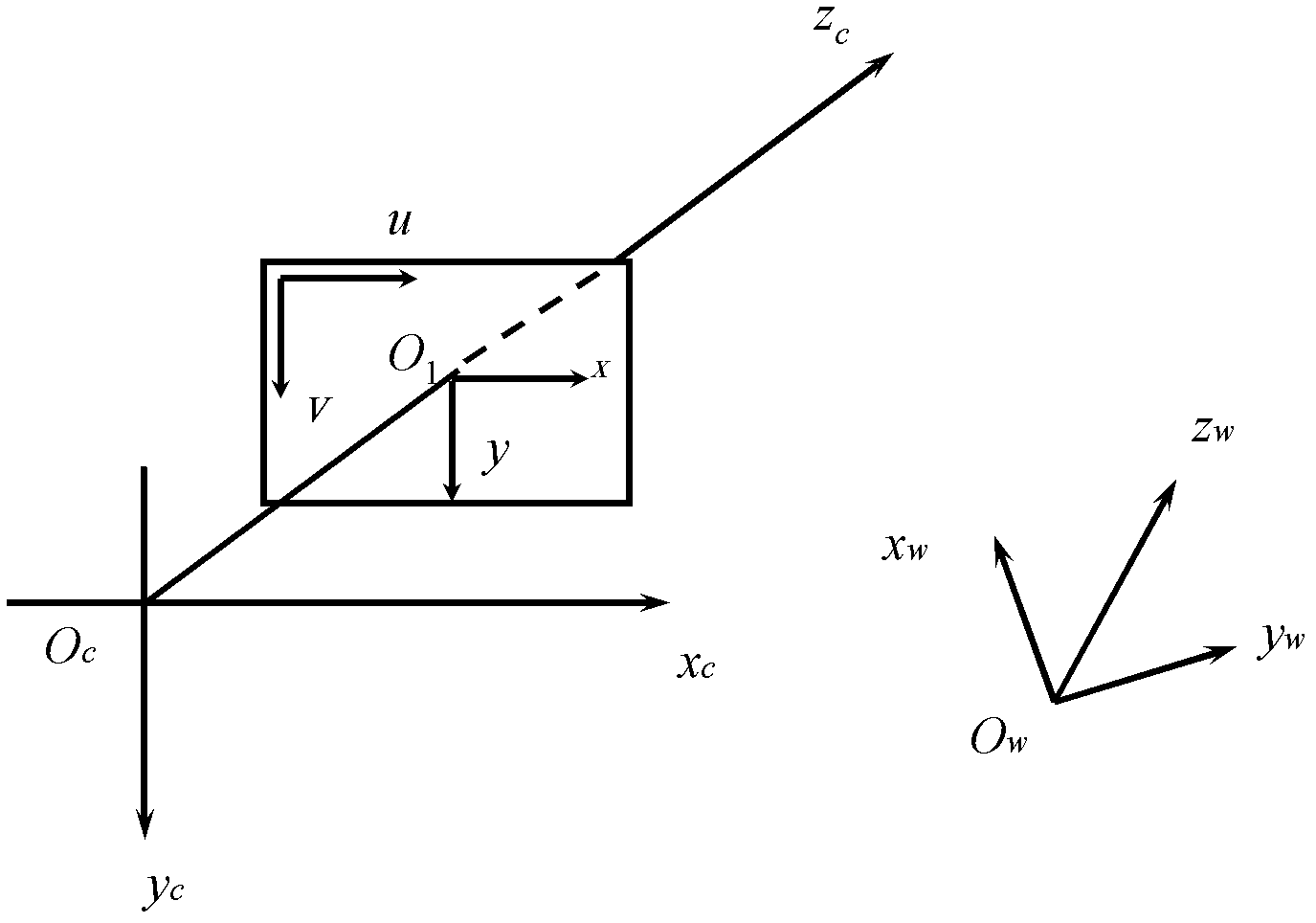
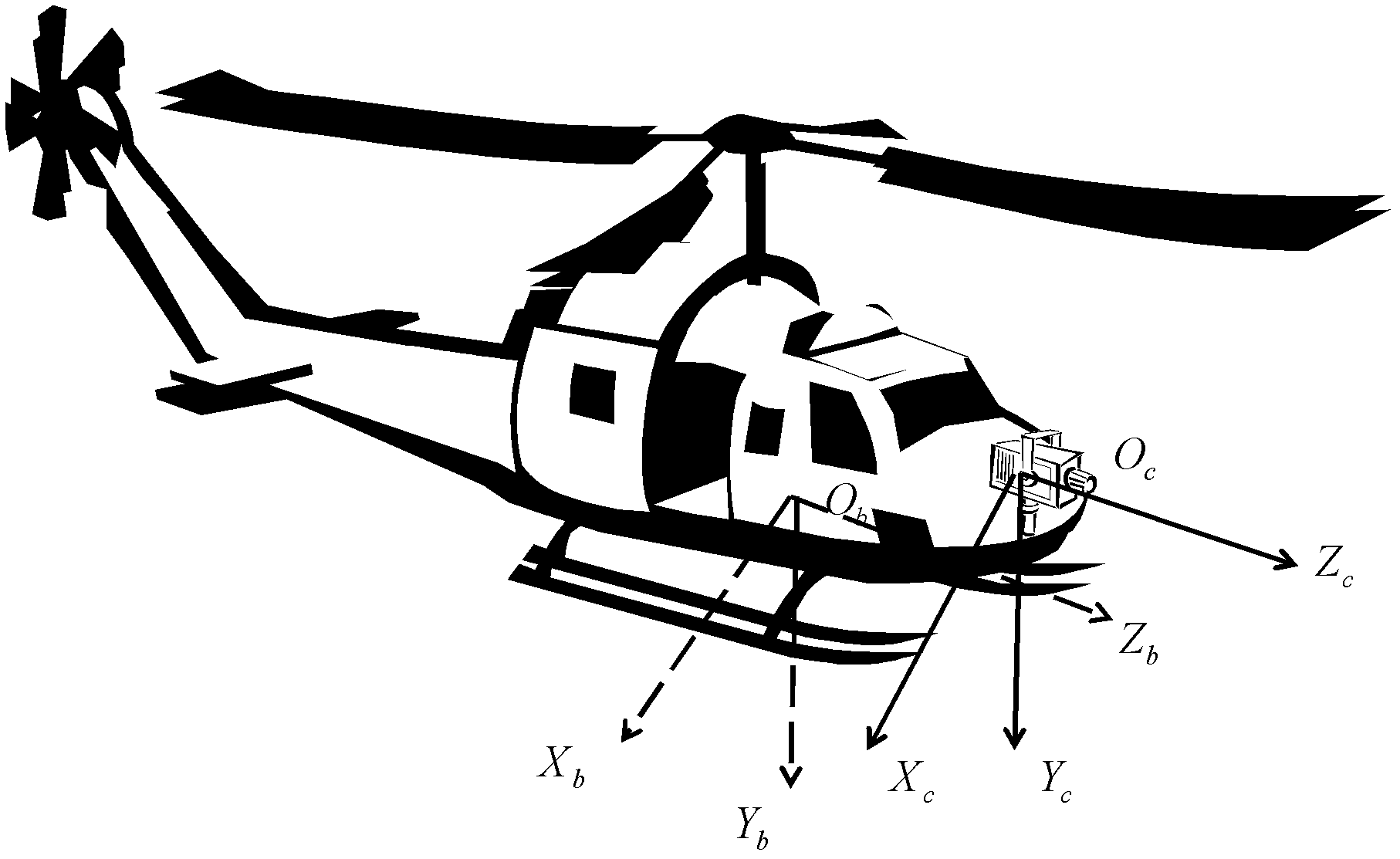
[0024] Step 1: Calibrate the internal parameters of the camera on the carrier, obtain the projection relationship of the spatial feature points from the world coordinate system to the image coordinate system, and perform nonlinear optimization on the distortion of the camera;
[0025] Step 2: Use the camera to collect sequence images, and extract the spatial feature point information in the two frames before and after the sequence images collected by the camera based on the scale-invariant feature extraction algorithm;
[0026] Step 3: Perform initial image matching based on the spatial feature point information obtained in step 2, and obtain the initial matching result; adaptively adjust the impact factor of the scale-invariant feature extraction algorithm in step 2 according to the amount of spatial feature point matching information, and obtain at least 7 pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More