

Automatic programming device and method
A technology of automatic programming and processing procedures, which is applied in the direction of automatic control devices, feeding devices, program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
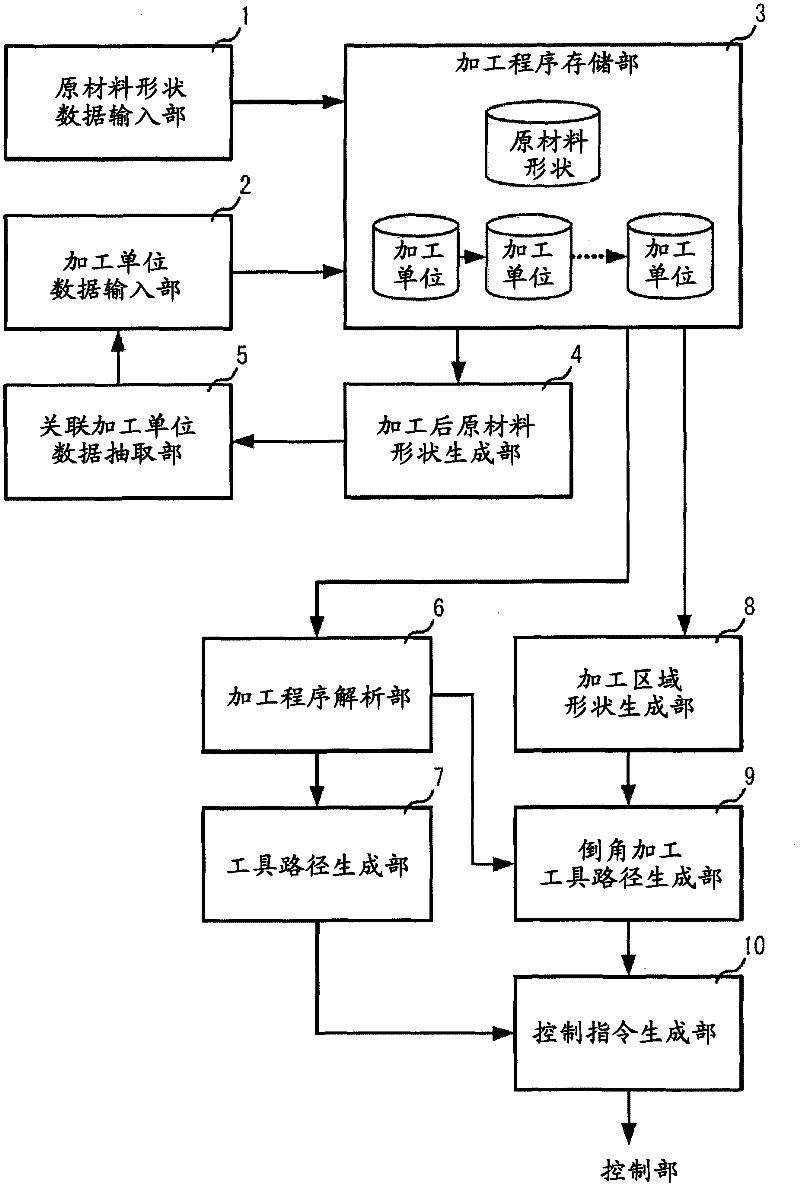
[0035] figure 1 It is a block diagram of the automatic programming device in Embodiment 1 of this invention. The automatic programming device generates control instruction data based on the processing unit data for partial processing of the shape of the raw material, and inputs data including the shape of the processing area, processing method, tool used, processing conditions, etc. for partial processing The processing unit data is analyzed, and the input processing unit data is analyzed to generate control command data for operating the machine tool. exist figure 1 Among them, the automatic programming device is composed of a material shape data input unit 1 , a processing unit data input unit 2 , a machining program storage unit 3 , a processing area shape generation unit 8 , and a control command generation unit 10 .
[0036] The material shape data input unit 1 inputs data defining the shape of the material from outside, and stores the data in the machining program stor...
Embodiment approach 2
[0070] Figure 11 It is a block diagram showing the configuration of the chamfering tool path generator in Embodiment 2 of the present invention. The chamfering toolpath generation unit 9 receives the processing region shape data of the portion to be chamfered from the processing region shape generation unit 8 . In the present embodiment, the content of generating the chamfering machining tool path based on the data related to the edge of the chamfering machining portion input from the machining area shape generating unit 8 will be described in detail. The chamfering tool path generation unit 9 acquires chamfering data from a data storage unit storing data related to chamfering, and generates a chamfering tool path. In the present embodiment, the machining area shape generating unit 8 corresponds to a data storage unit, but may be distributed with the machining program storage unit 3 depending on the content of the acquired data. The chamfering tool path generation unit 9 ac...
Embodiment approach 3
[0133] Figure 23 It is an explanatory diagram of a cross-sectional plane defined in the third embodiment. In Embodiment 2, 5-axis machining is assumed for chamfering toolpath generation, but it can also be applied to 3-axis machining to obtain a toolpath approximately. However, in the case of 3-axis machining, unlike the case of 5-axis machining, the tool posture is constant, so there is a slightly different point in the processing related to the section plane Fij. Points different from Embodiment 2 will be described below.
[0134] like Figure 23 As shown, the section plane Fij in the case of 3-axis machining is defined as passing through the reference point Pij, and transferring the direction vector of the reference point Pij in the edge Ei, that is, the reference vector Vij, to the depth direction perpendicular to the groove (X Direction) the plane generated by the transfer vector Vij' perpendicular to the plane. Specifically, for the reference point Pij obtained by d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More