

Obstacle-crossing all-position automatic welding robot
An autonomous welding and robot technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve the problems of welding dead angle, single sensor mode of robot, and inability to realize continuous welding work, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in detail below in conjunction with accompanying drawing:
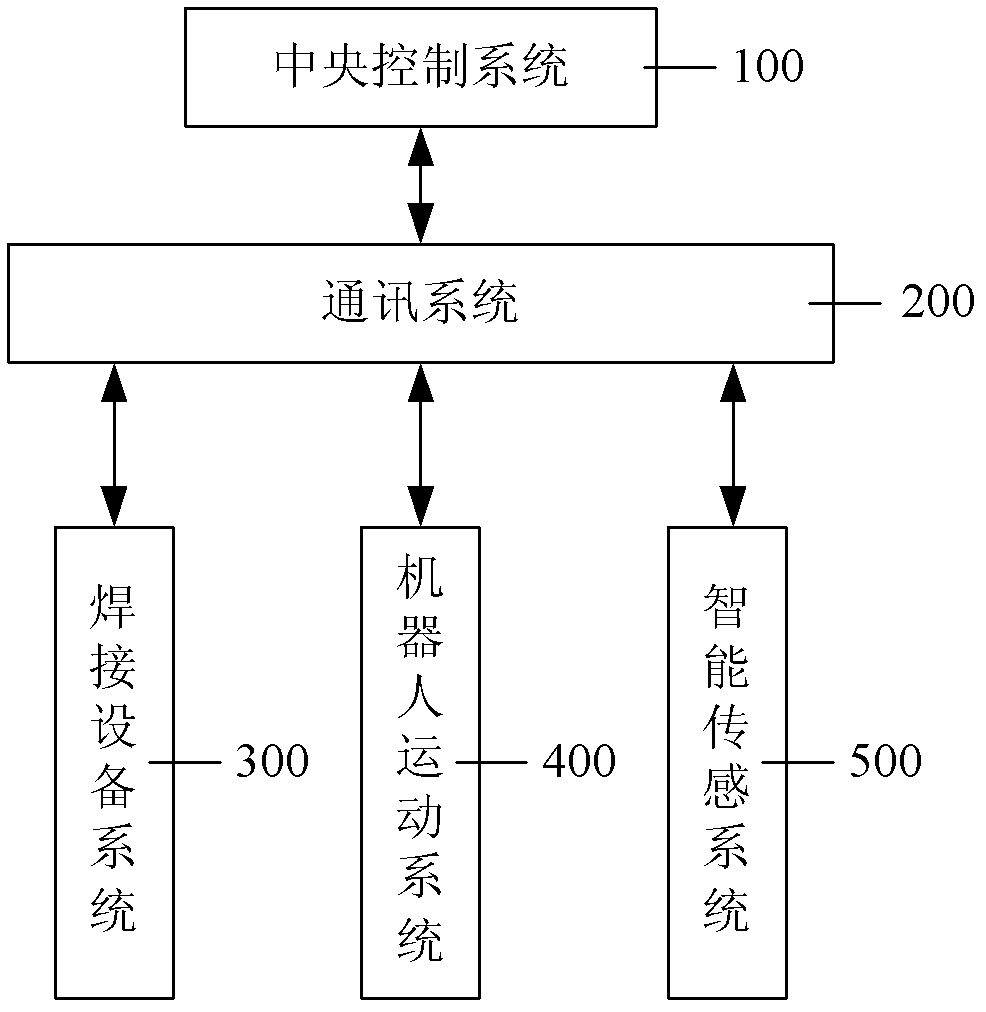
[0037] Please refer to Figure 1-9 As shown, the obstacle-crossing all-position autonomous welding robot of the present invention includes a central control system 100 , a communication system 200 , a welding equipment system 300 , a robot motion system 400 , and an intelligent sensor system 500 .
[0038] Please refer to Figures 4 to 9, the robot motion system 400 includes a frame 401, and a mechanical arm 402 composed of multiple joints located above the frame 401 is used to adjust any position and posture within the working range, and any position includes X, Y, and Z directions. The position and posture of the degree of freedom are generated by the movement of each joint of the mechanical arm 402, which realizes the full-position movement of the motion track of the welding workpiece; multiple sets of drive shafts 403 located below the vehicle frame 401, each set of drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More