

Multiple-antenna GPS(Global Positioning System)/GF-INS (Gyroscope-Free-Inertial Navigation System) depth combination attitude determining method
A GF-INS, multi-antenna technology, used in satellite radio beacon positioning systems, navigation through velocity/acceleration measurement, radio wave measurement systems, etc., to solve research and application limitations, eclipse, attitude angle calculation errors, etc. It can improve the anti-interference ability, improve the search success rate, and overcome the installation difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
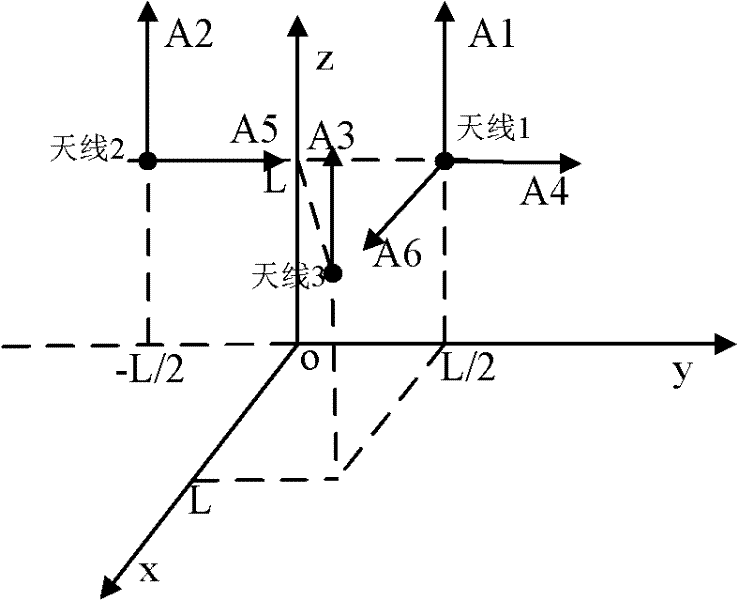
[0058] Such as figure 1 As shown, in the embodiment of the present invention, GF-INS adopts an easy-to-install accelerometer configuration scheme, which includes 6 accelerometers A1, A2, A3, A4, A5, A6; there are 3 GPS antennas: main antenna 1 , secondary antenna 2, 3,; accelerometers A1, A4, A6 are installed together with main antenna 1, A2 and A5 are installed together with secondary antenna 2, A3 is installed together with secondary antenna 3; accelerometers A1, A2, A3 The sensitive direction of A4 and A5 is along the positive direction of the z-axis of the carrier coordinate system, the sensitive direction of A4 and A5 is along the positive direction of the x-axis of the carrier coordinate system, and the sensitive direction of A6 is along the positive direction of the y-axis of the carrier coordinate system; the three antennas are respectively fixed on the three carrier Above; the base line formed by the carrier fixedly connected to the main antenna 1 and the auxiliary an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More