

Adaptive filtering method based on observation noise covariance matrix estimation
An observation noise variance and self-adaptive filtering technology, which is applied in measuring devices, radio wave measurement systems, satellite radio beacon positioning systems, etc., can solve problems affecting filtering accuracy and deviations in observation noise characteristics, so as to improve filtering accuracy, The effect of small calculation and storage, improved accuracy and anti-interference performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
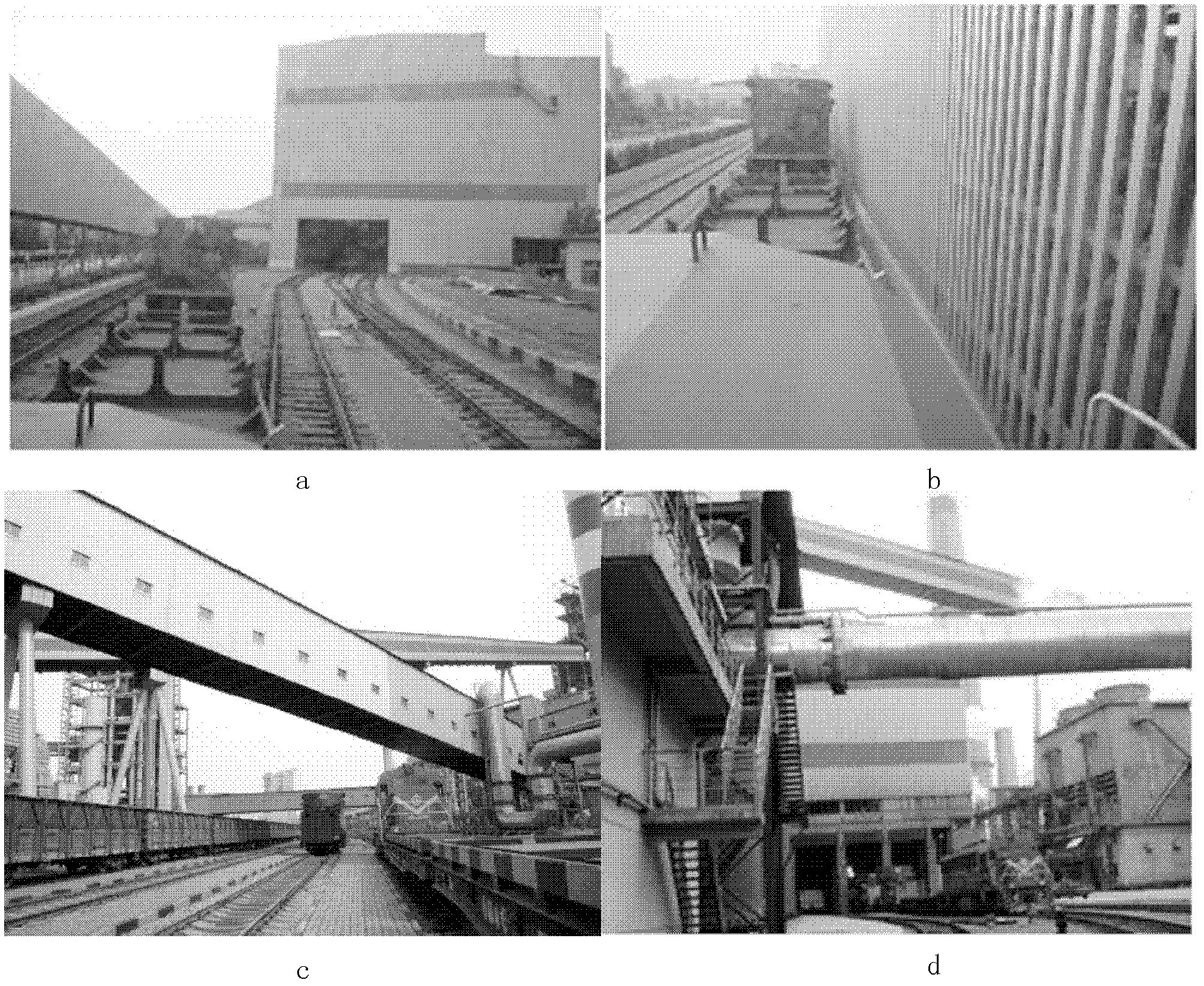
[0118] The present invention is applied in the locomotive GPS / DR positioning system of Handan Steel Plant, as image 3 as shown, image 3 The locomotive in a is running in a relatively open area, image 3 b. image 3 c. image 3 The GPS on the locomotive in d is interfered by surrounding buildings, belt conveyors, and pipelines. During the locomotive running, the GPS measurement system has a large positioning error due to the obstruction of tall buildings, belt conveyors, and pipelines. If the locomotive passes the factory building Under the tracks, the GPS signal will be completely interrupted. In the locomotive work site, the road conditions are relatively complicated, the distance between adjacent railroad tracks is about 5m, and there are many obstacles. Due to the operation requirements, the locomotive runs at a low speed, which eventually leads to high dynamic GPS measurement noise during the locomotive positioning process. among the changes.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More