

Multi-position lower limb rehabilitation training robot
A rehabilitation training and robotics technology, applied to muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve the problems of low efficiency, high intensity, and patients do not pay enough attention, and achieve good training effect, flexible movement and layout. reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention provides a multi-posture lower limb rehabilitation training robot. The present invention will be further described below in conjunction with the accompanying drawings and specific implementation methods.
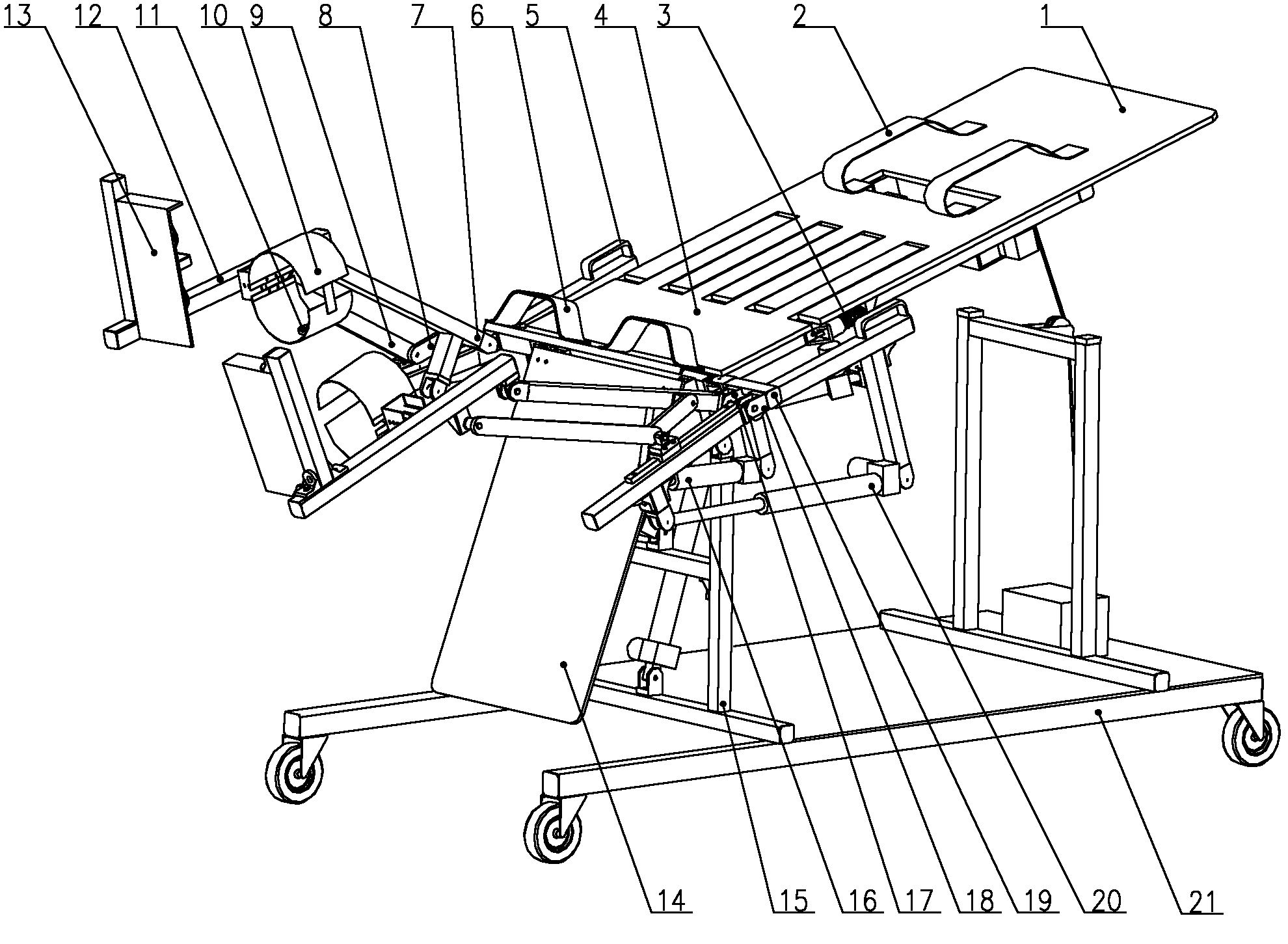
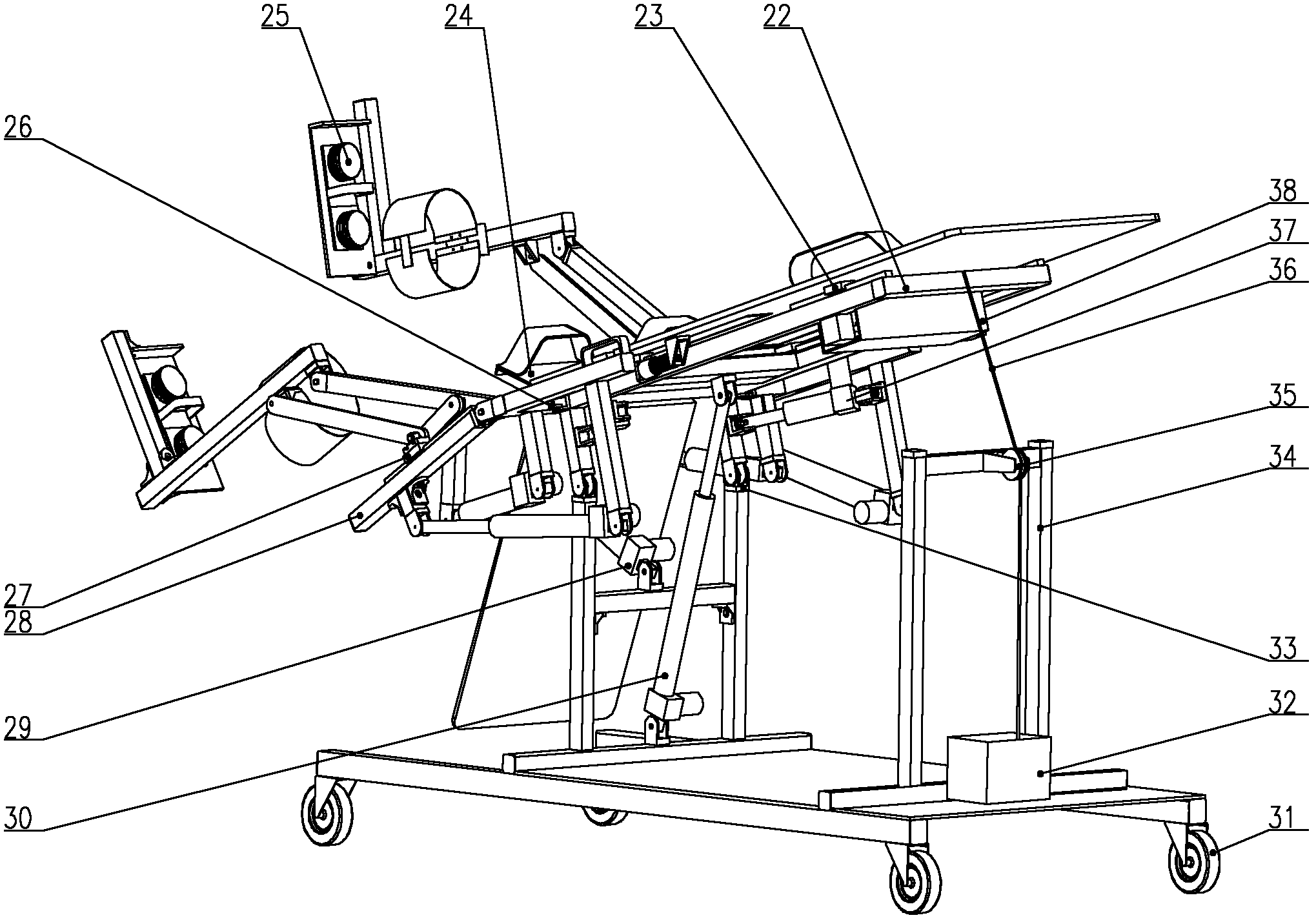
[0024] See figure 1 and figure 2 , the multi-posture lower limb rehabilitation robot includes a support mechanism, a patient fixation system, a lower limb training device and a control system. Overall dimensions length × width × height = 2000 × 600 × 1000mm 3 .
[0025] The supporting mechanism comprises a base 21 of the fixing device, a back panel frame 22 carrying a patient fixing system and a lower limb training device, and a front support frame 34 and a rear support frame 15 are fixedly arranged on the base 21; One end of the first electric push rod 30 is hinged on the rear support frame 15, and the other end is hinged on the back flat frame 22 to push the back flat frame 22 to realize the connection between the back flat frame 22 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More