Six-foot walking robot
A walking robot and robot technology, applied in the field of robotics, can solve problems such as destroying the original state of the ground surface, and achieve the effects of improved movement coordination, high reliability, and clear task division
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with accompanying drawing.
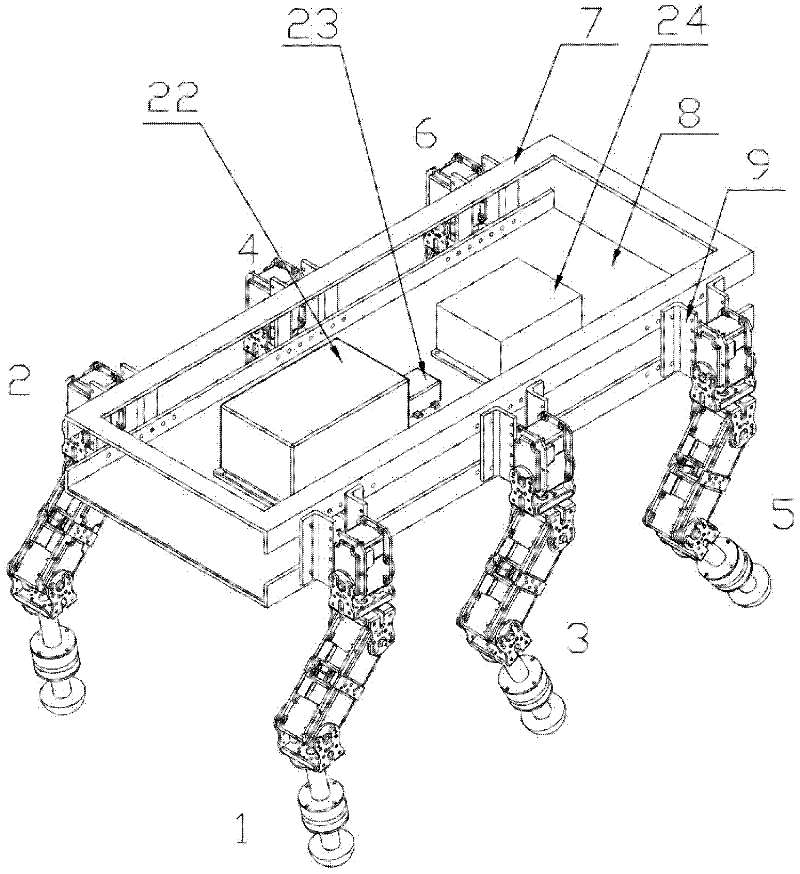
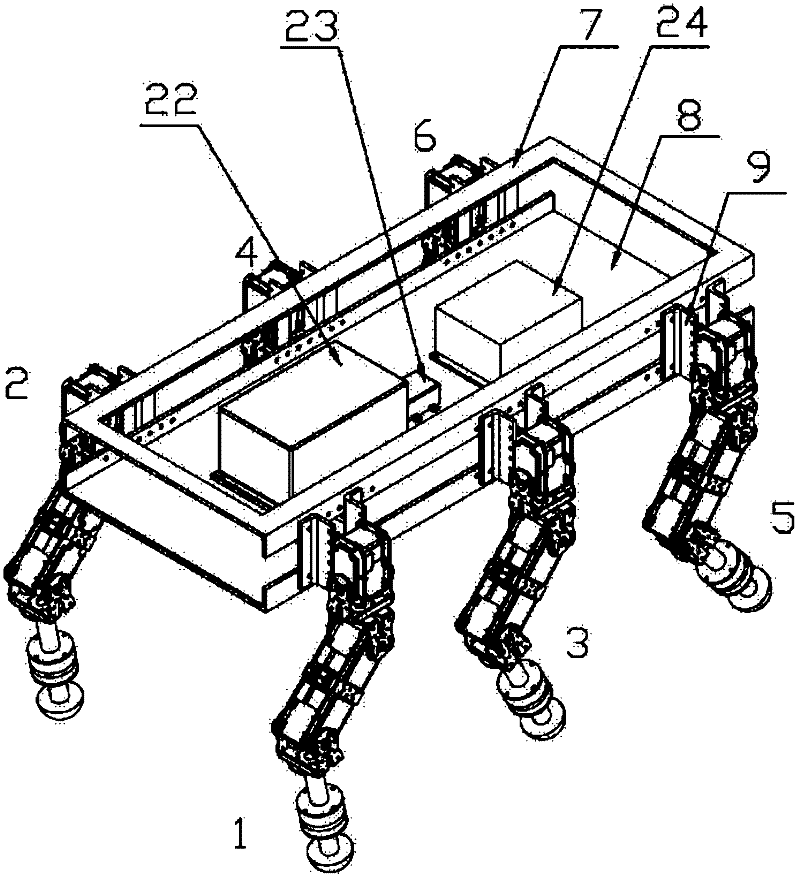
[0023] Such as figure 1 Shown, the present invention is made up of hexapod walking robot mechanical body and hexapod walking robot control system.
[0024] The mechanical body of the hexapod walking robot includes a frame and robot legs. The frame includes the fuselage and 6 leg fixing plate sets. The fuselage comprises a fuselage upper plate 7 and a fuselage lower plate 8, the fuselage upper plate 7 is located directly above the fuselage lower plate 8, and the upper fuselage plate 7 and the fuselage lower plate 8 are distributed with holes symmetrical up and down at equal intervals, It is convenient to adjust the installation position of the leg fixing plate group. A set of leg fixing plates includes two leg fixing plates with the same structure. The leg fixing plates are in the shape of a right angle. There are equally spaced holes distributed on the surface where the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More