

Group flying robot with distribution and self-assembly characteristics
A flying robot and robot technology, applied in aircraft, aircraft parts, transportation and packaging, etc., can solve the problem of scalability, redundancy and robustness of group robots without the effective application of flying robots, unable to adapt to complex and changeable environments and Solve problems such as simplification of tasks and functions, achieve flexible ground maneuverability, improve docking efficiency, and compact design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with accompanying drawing and embodiment:
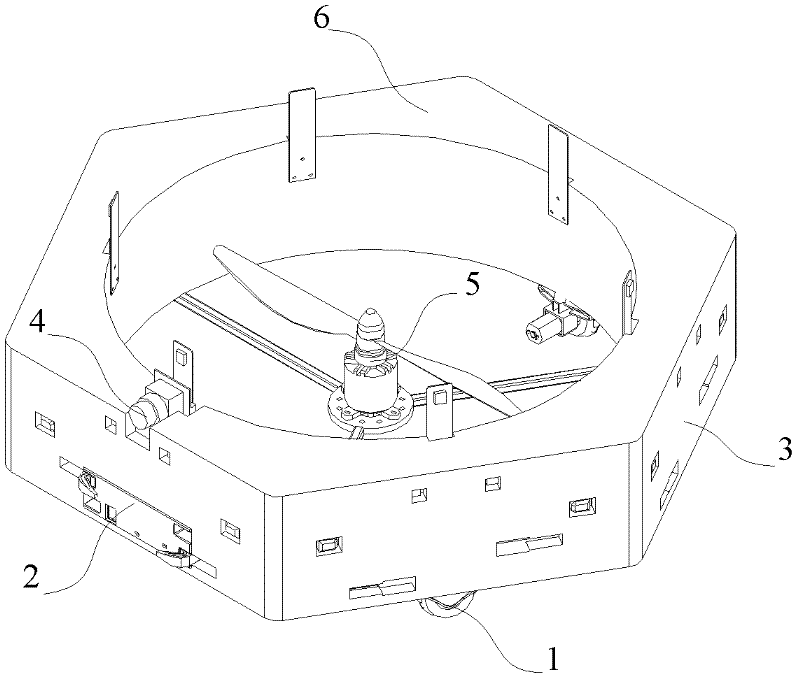
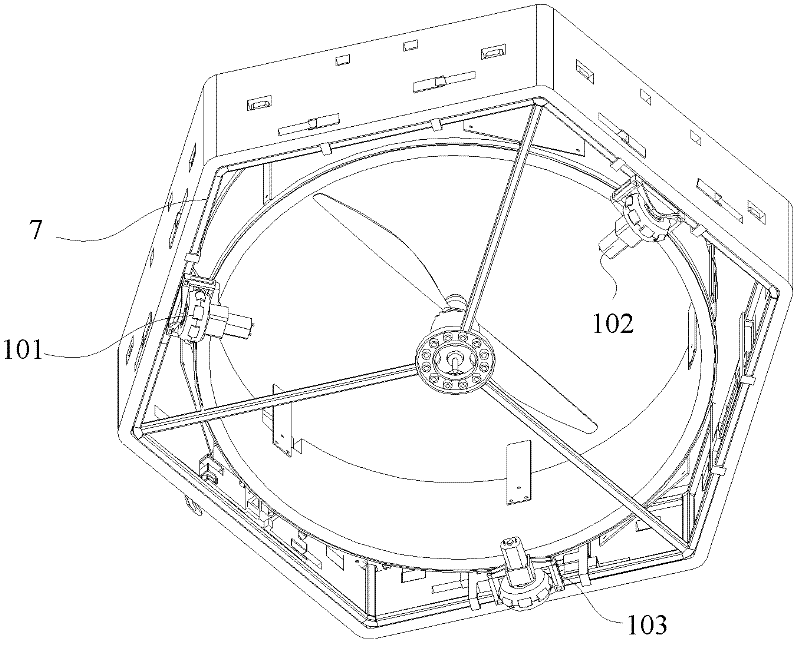
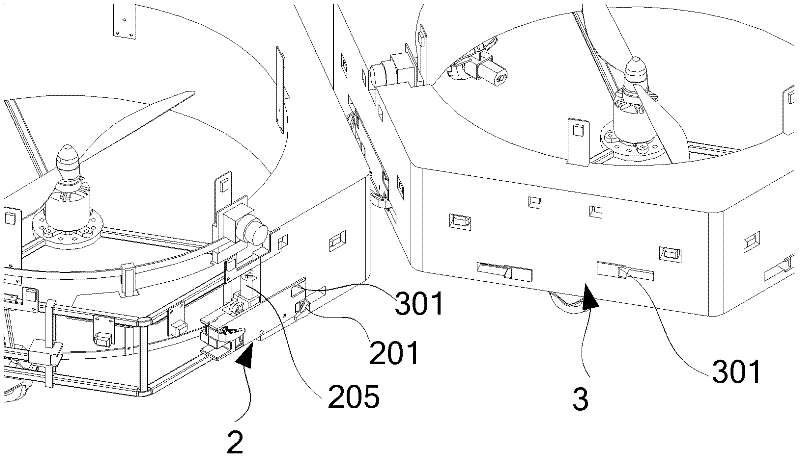
[0031] In the distributed and self-assembled swarm flying robot of the present invention, each swarm flying robot is composed of at least three robot units, and the three robot units must include both forward propeller robot units and reverse propulsion robot units . The robot monomer such as figure 1 As shown, there is a regular geometric shape structure, which can be a hollow cylinder structure (or called a hollow prism structure) such as a triangle, a quadrangle, a pentagon or a hexagon, and the hollow cylinder structure is composed of a shell 6 Cover rack 7 (such as Figure 5 ), each robot is composed of a ground movement module 1, an active docking module 2, a passive docking module 3, a sensor positioning module 4, a flight power module 5 and a control module 11 (such as Figure 5 ), each module has a specific size and independent function,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More