

Method for calibrating relation between actual road distance and corresponding pixel distance in traffic video
A technology of actual distance and pixel distance, applied in the field of traffic video image signal processing, can solve the problems of application limitation, inability to obtain, large data error, etc., to achieve the effect of simplified operation, improved calibration accuracy, and guaranteed accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
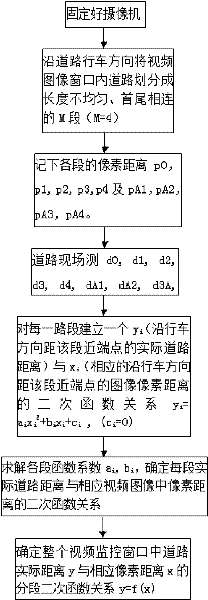
[0031] A method for calibrating the relationship between the actual road distance and the corresponding pixel distance in a traffic video, comprising steps:
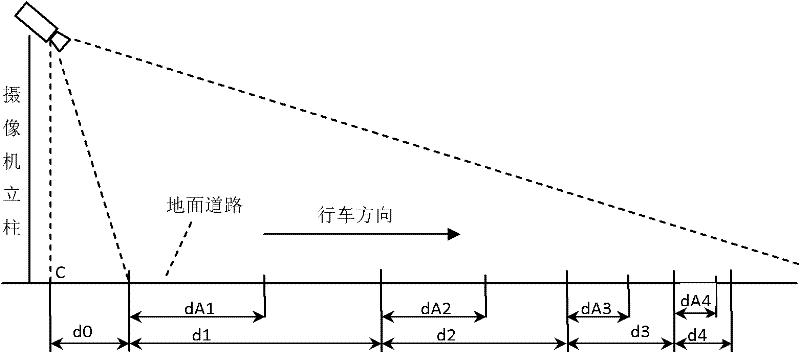
[0032] 1) First set up a traffic video surveillance camera above the road, and set the point on the road directly below the camera as C;
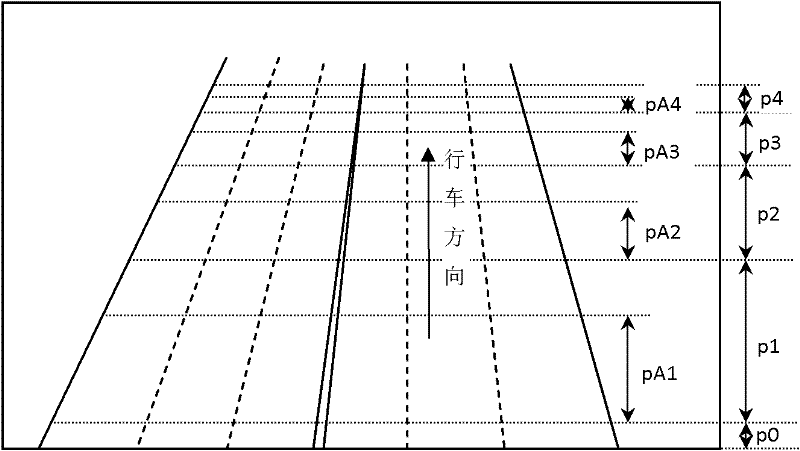
[0033] 2) The road in the video image window is divided into M sections with uneven length and end-to-end connection along the road driving direction, and the endpoint near point C in each section is called the near-end point, and the other end point is called the far-end point; The distance between the pixels of the far and near endpoints of each segment is respectively set as: p0, p1, p2, ..., pi; among them, p0 refers to the distance between the pixel of the near endpoint of the first segment and the pixel along the road driving direction on the lower edge of the image. distance,
[0034] 3) Determine any pixel point in the middle of each section of the road in the video image wi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More