

Combined vehicle position measurement method
A measurement method and combined technology, applied in the fields of inertial navigation, satellite navigation and mobile measurement, can solve the problems of high device requirements, difficult implementation, and position error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
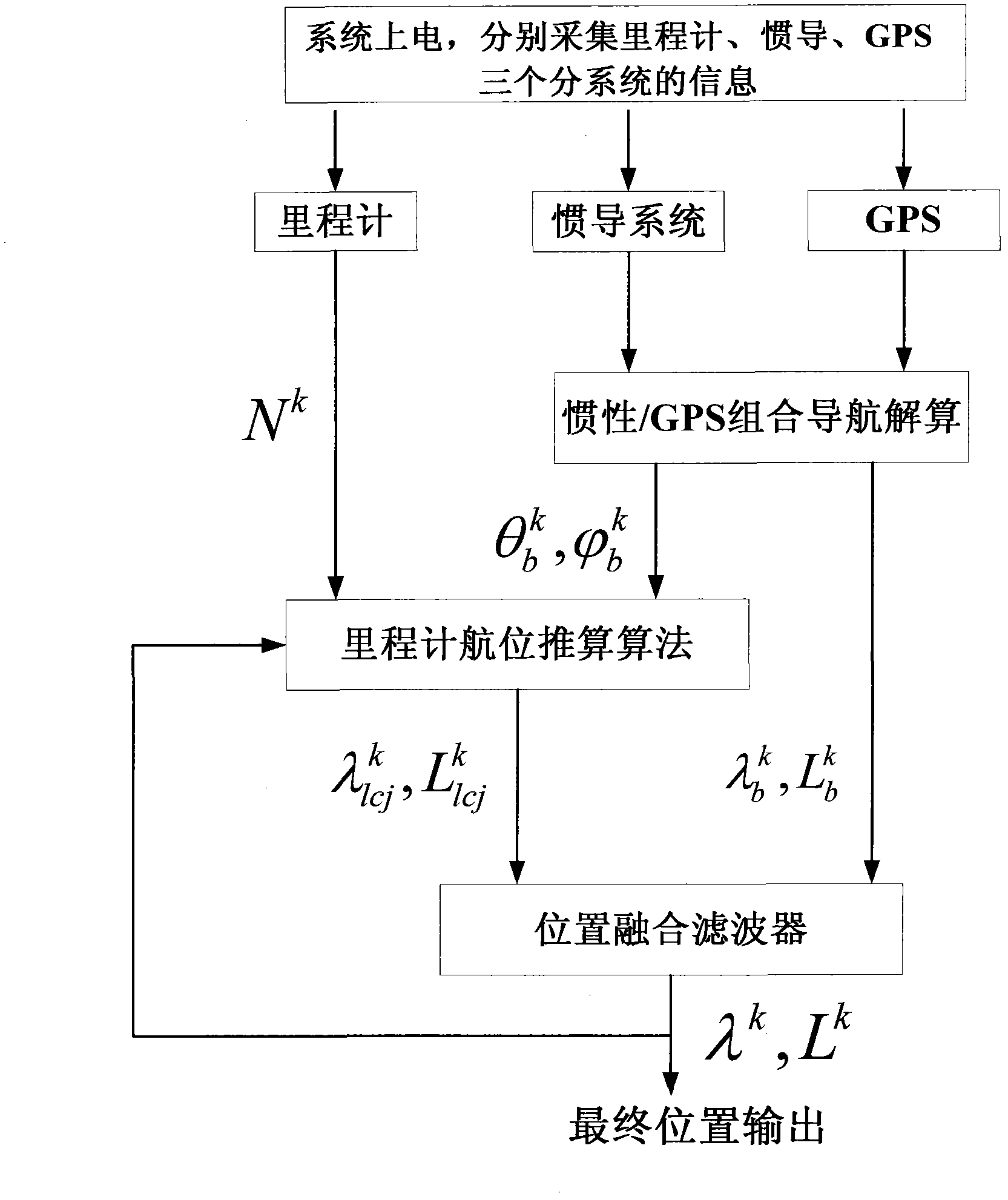
Method used
Image



Examples
Embodiment Construction
[0025] This embodiment demonstrates the feasibility of the algorithm described in this application through a set of actual sports car experimental data.
[0026] The inertial navigation system selected in this embodiment is a MEMS inertial navigation system, wherein the gyroscope selects the STIM202 type MEMS gyroscope of Sensonor Company for use, and its comprehensive drift is about 30 ° / h, and the accelerometer selects the MS9010 type MEMS accelerometer of Swiss Colibry Company for use, and its comprehensive The zero offset is about 1 mg; the GPS uses OEMV-2 dual-frequency dual-satellite GPS from Canadian Novtel, and its single-point positioning accuracy is about 2m without any interference; the odometer uses a magnetic induction Hall sensor, and the wheel turns out 1 pulse.
[0027] The experimental site of this embodiment is selected near Zhongguancun, Haidian District, Beijing, where vehicles need to pass through the high-rise area of Zhongguancun, where GPS will be ser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More