

Vision and electromagnet based fusion inspecting navigation control system
A control system and electromagnetic technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of less road information, easy to be interfered, misnavigation, etc., and achieve high speed efficiency, low cost, and low power consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
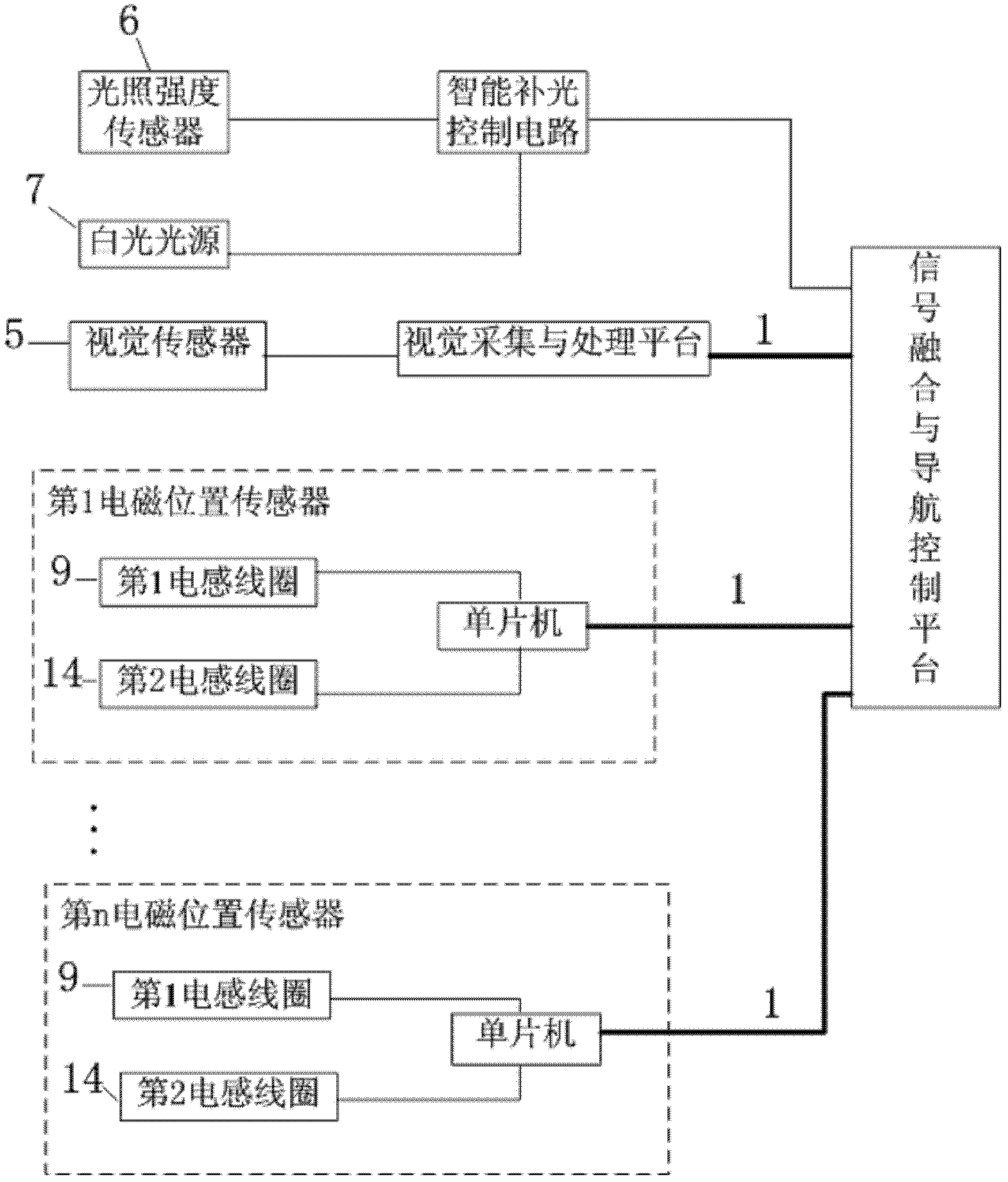
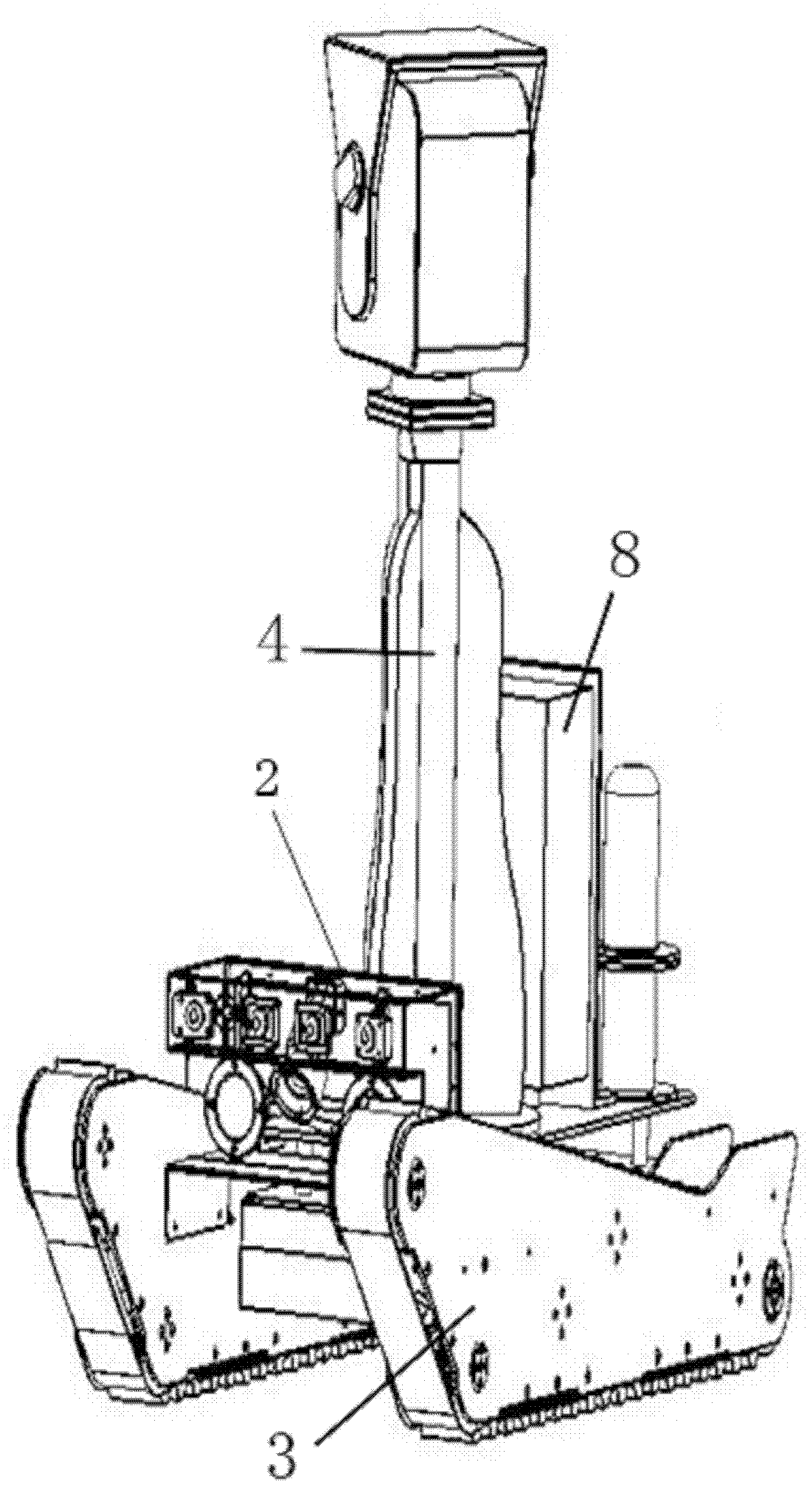
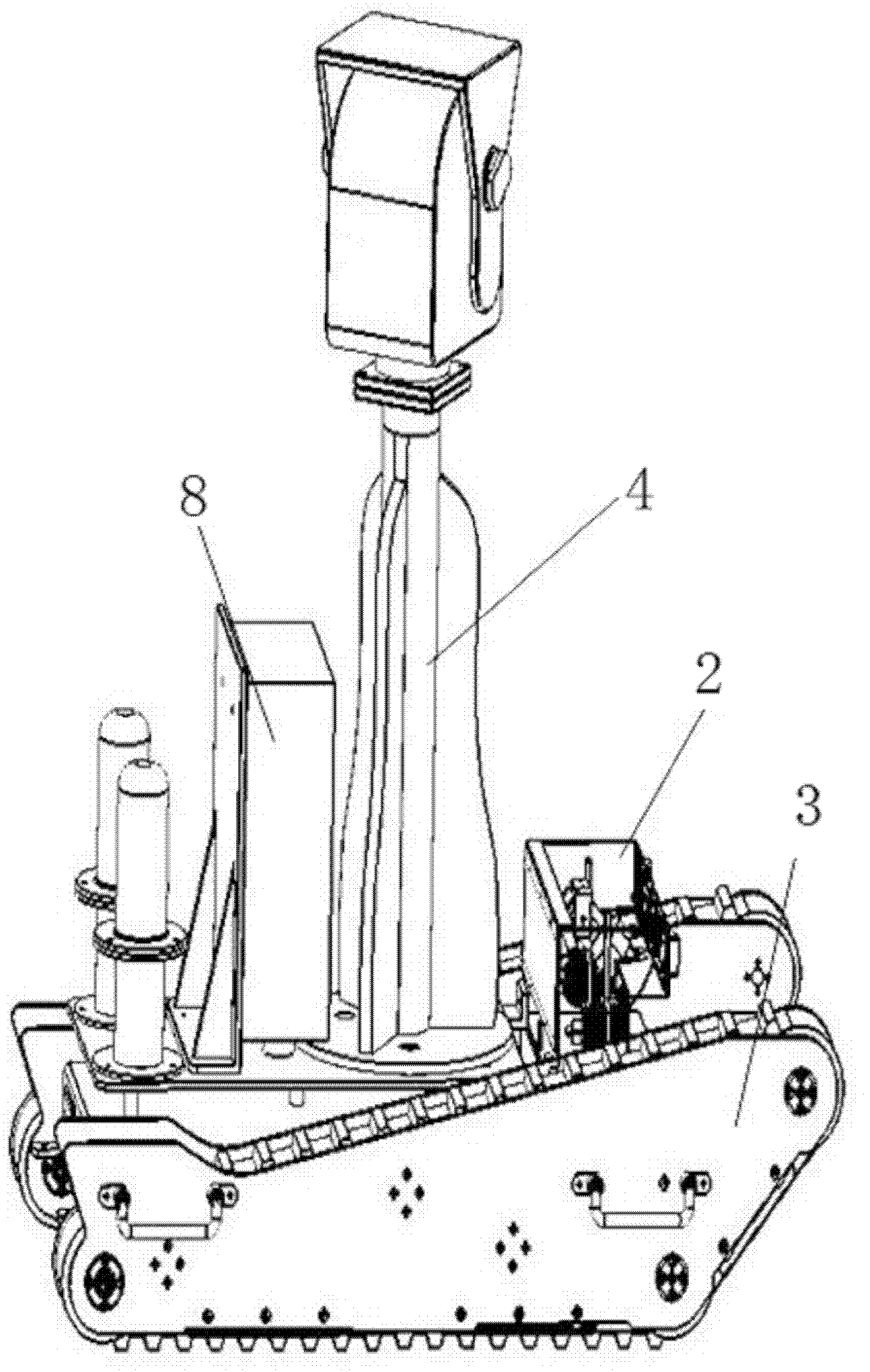
[0036] Such as figure 1 As shown, the structure of the line patrol navigation control system based on vision and electromagnetic fusion is as follows: the intelligent supplementary light control circuit is respectively connected to the light intensity sensor 6, the white light source 7 and the signal fusion and navigation control platform, and the visual acquisition and processing platform is connected to the visual sensor 5 , and connect the signal fusion and navigation control platform through the RS485 bus 1, the yellow navigation line 13 is located on the road surface; the induction navigation line 12 is laid under the road surface, the induction navigation line 12 is a BV plastic copper core wire, and the two ends of the induction navigation line 12 are connected to the electromagnetic The signal generators are connected to form a path, and the electromagnetic sig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More