

High-flexibility three-DOF (Degree of Freedom) spatial parallel mechanism
A degree of freedom, flexible technology, applied in the field of CNC machine tools, to achieve the effect of high flexibility, high turning ability, easy operation accuracy and quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
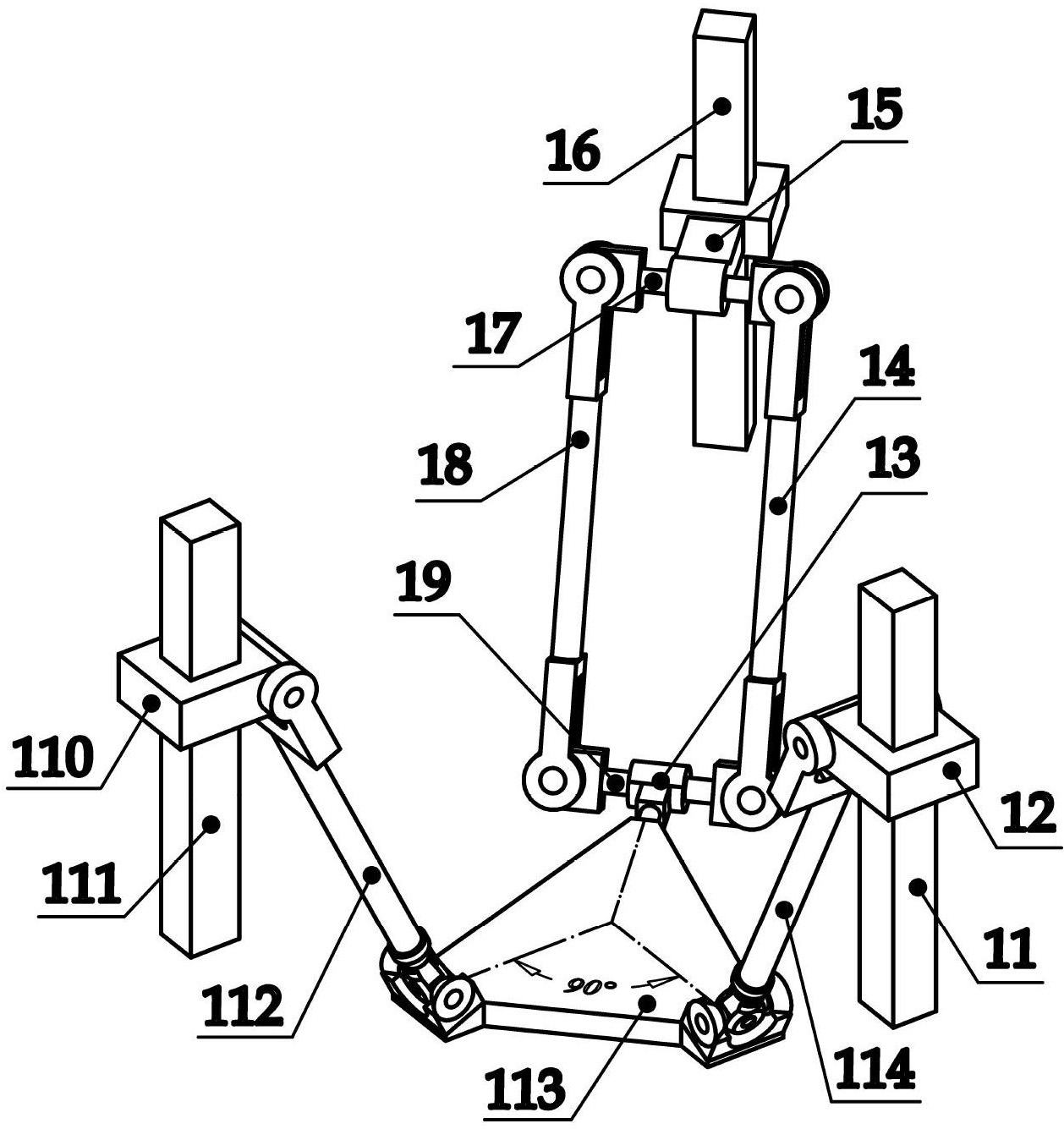
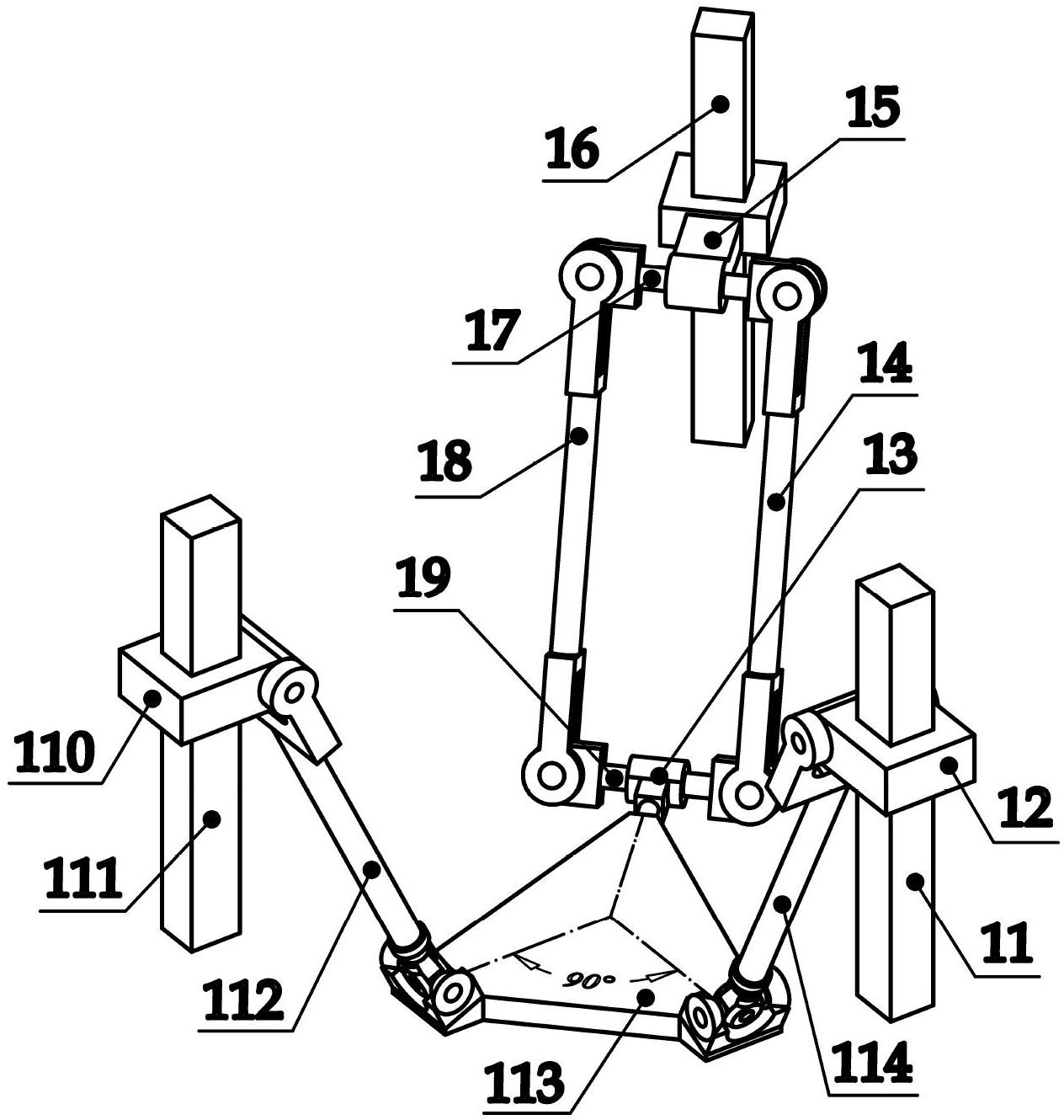
[0017] The structure of a three-degree-of-freedom space parallel mechanism with high flexibility in this embodiment is as follows: figure 1 As shown, it includes a fixed platform 11, a fixed platform 16, a fixed platform 111, a moving platform 113 and the first, second, and third branch chains, and the three branch chains are respectively connected to the fixed platform 11, the fixed platform 16, and the fixed platform 111. Between the moving platform 113 and the fixed platform 11, the fixed platform 16, the fixed platform 111 and the moving platform 113, a space closed-loop mechanism is formed.
[0018] The first and second branch chains are PRS type motion branch chains, including: slider 12, slider 110, connecting rod 114, connecting rod 112 and kinematic pairs. There are three kinematic pairs, one is to be connected to the moving pair P between the fixed platform 11, the fixed platform 111 and the slide block 12, the slide block 110, and the other is to be connected to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More