

Task collaborative visual navigation method of two unmanned aerial vehicles
A navigation method and UAV technology, applied in navigation, mapping and navigation, measurement devices, etc., can solve problems such as high energy consumption, many visual sensing devices, and bottlenecks in UAV guidance and control links, and achieve matching Good and reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention. On the contrary, the embodiments of the present invention include all changes, modifications and equivalents coming within the spirit and scope of the appended claims.
[0023] The following describes a task cooperative visual navigation method for two drones according to an embodiment of the present invention with reference to the accompanying drawings.
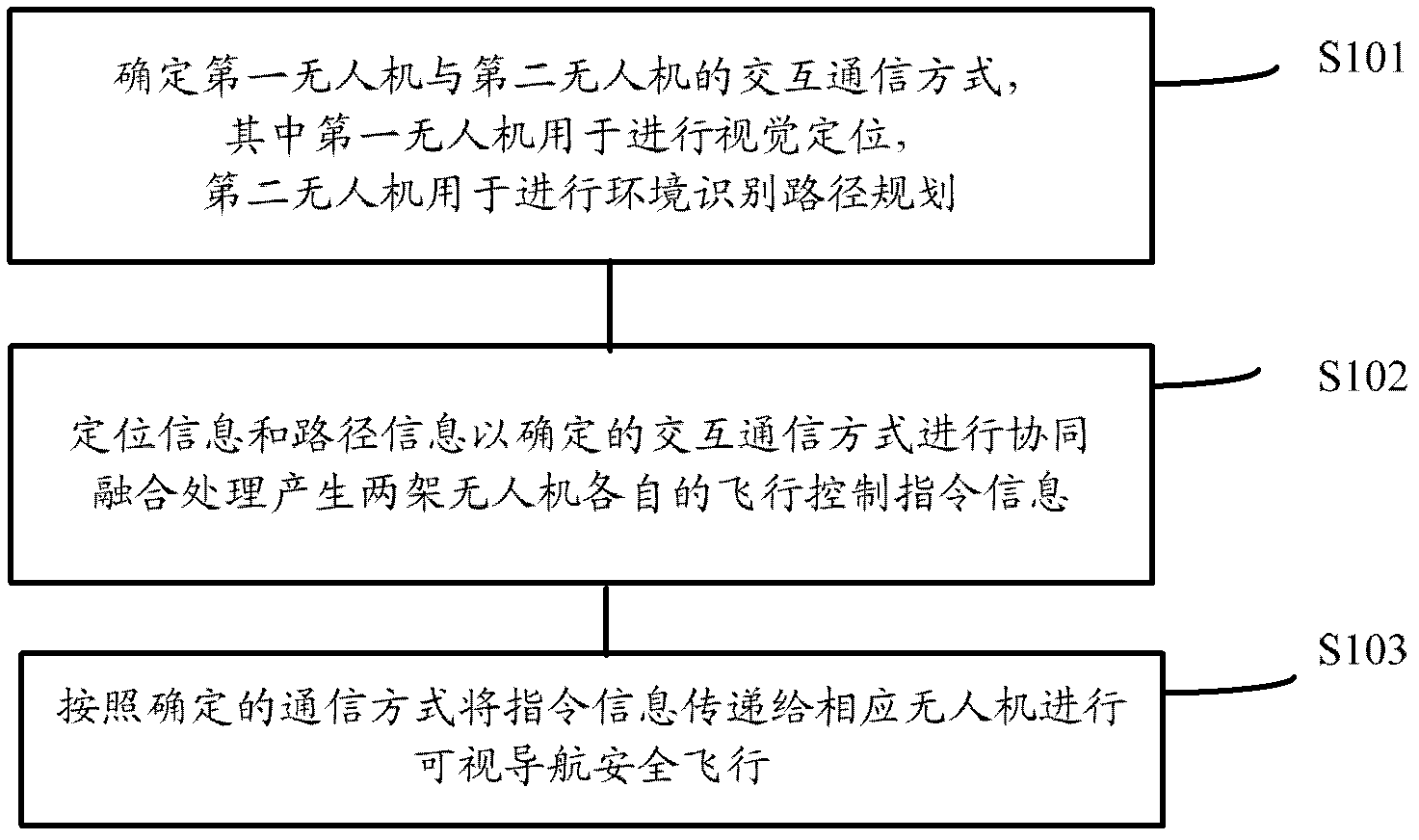
[0024] figure 1 It is a flow chart of a task cooperative visual navigation method for two UAVs according to an embodiment of the present invention.
[0025] like figure 1 As shown, ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More