

Lane line detection method based on monocular vision
A lane line detection and monocular vision technology, applied in the field of intelligent vehicle assisted driving system, can solve the problems of not taking into account both real-time and reliability, and achieve the effect of reducing the amount of calculation, ensuring real-time performance and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
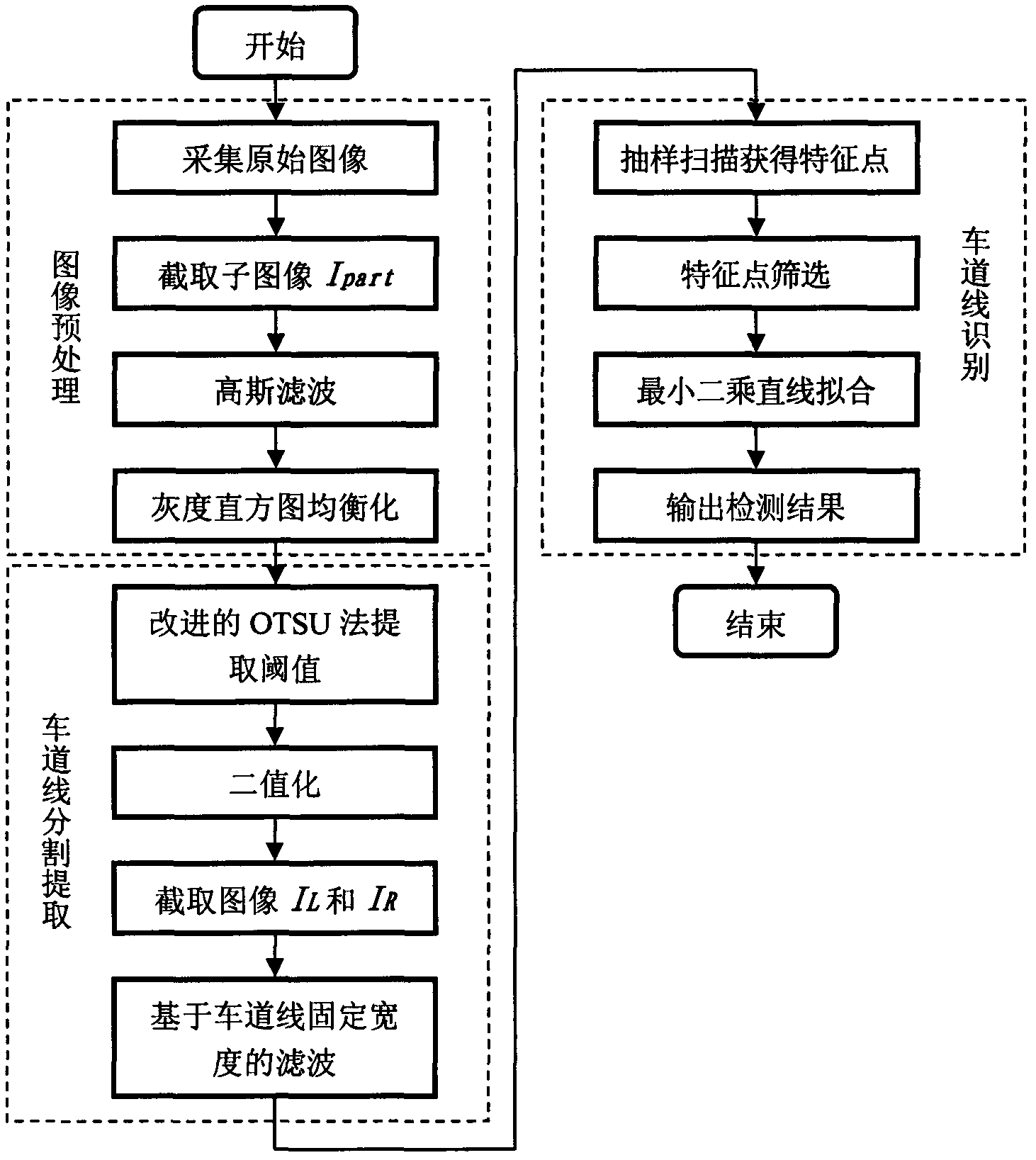
[0050] The general flow chart of the lane line detection method of the present invention is as follows figure 1 As shown, first, Gaussian filtering and gray level equalization are used for image preprocessing, and then the improved OTSU method, binarization and filtering based on the fixed width of the lane line are used to achieve the segmentation and extraction of lane lines. Finally, sampling line scanning and feature points are used. The method of screening and least squares straight line fitting realizes the recognition of lane lines. The specific implementation process of the technical solution of the present invention will be described below with reference to the accompanying drawings.
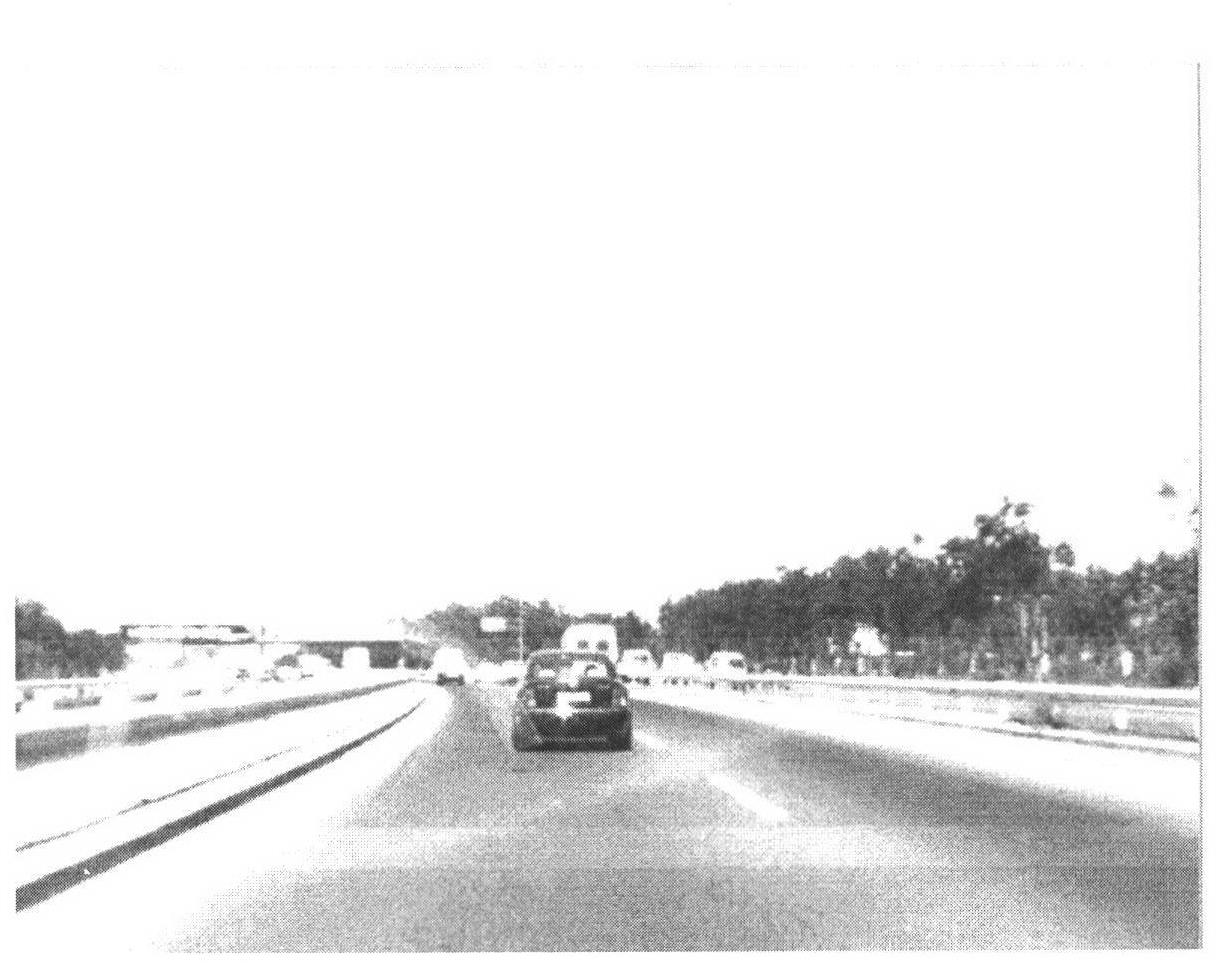
[0051] 1. Collect the original image I of the road in front of the vehicle in real time. Using MVC1000MS CMOS monochrome industrial camera, PENTAX C815B 8.5mm 1:1.5 CCTV lens, real-time acquisition of grayscale images. The focus is set to 1.8 feet, the aperture is set to 8, and the exposu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More