

Crawling mechanism for peristaltic cable robot
A robot and cable technology, applied in the field of peristaltic cable robot crawling mechanism, can solve the problems of complex mechanical structure and control system, failure to be widely used, complex mechanical structure and safety return mechanism, etc., and achieve simple and reliable safety return mechanism , adapt to large deflection cable climbing, light weight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
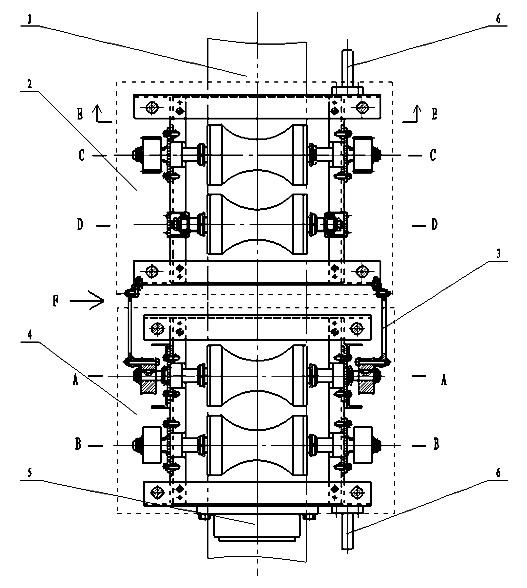
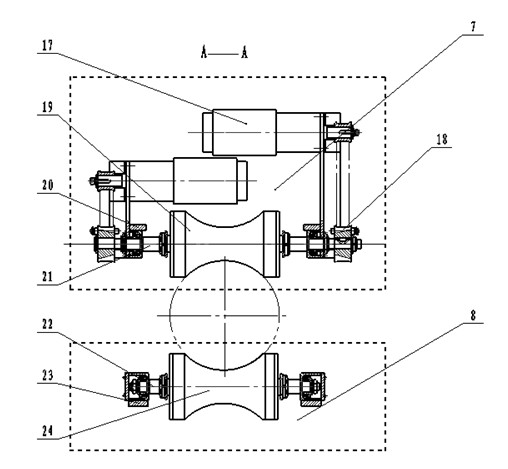
[0030]The creeping cable robot crawling mechanism provided by the present invention includes a crawling mechanism and a safety return mechanism 16. The crawling mechanism includes a driving wheel device 4, a driven wheel device 2, a crank slider mechanism 3, a control box 5, and a sensor 6. The driving wheel device 4 is divided into the main upper frame locking wheel device 7 and the main lower frame locking wheel device 8, and the main upper frame locking wheel device 7 and the main lower frame locking wheel device 8 pass through the driving wheel 19, the main locking wheel device Wheel 24, the main locking wheel 50 and the following locking wheel 51 are tightly locked on both sides of the cable 1, the main upper frame frame 20 in the main upper frame locking wheel device 7 and the main lower frame of the main lower frame locking wheel device 8 The frame 23 is connected by four connecting bolts 11 and nuts 13 plus springs 12; From the lower frame locking wheel device 10, from...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More