

Pruning robot system for grape vines
A robot system and vine technology, applied in the field of intelligent robots, can solve the problems of high labor intensity and low work efficiency, and achieve the effects of reducing labor intensity, improving work efficiency, and saving labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings.
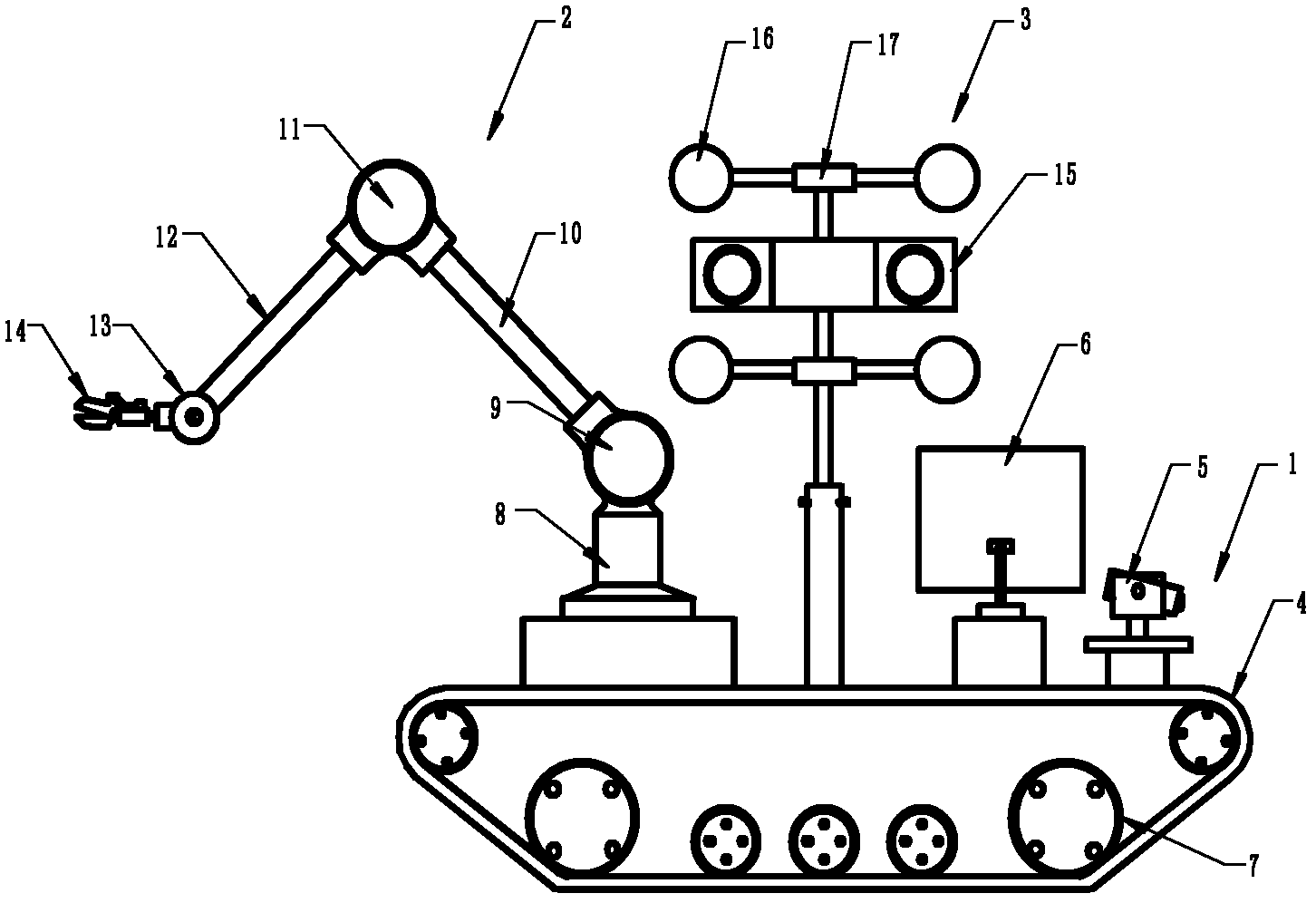
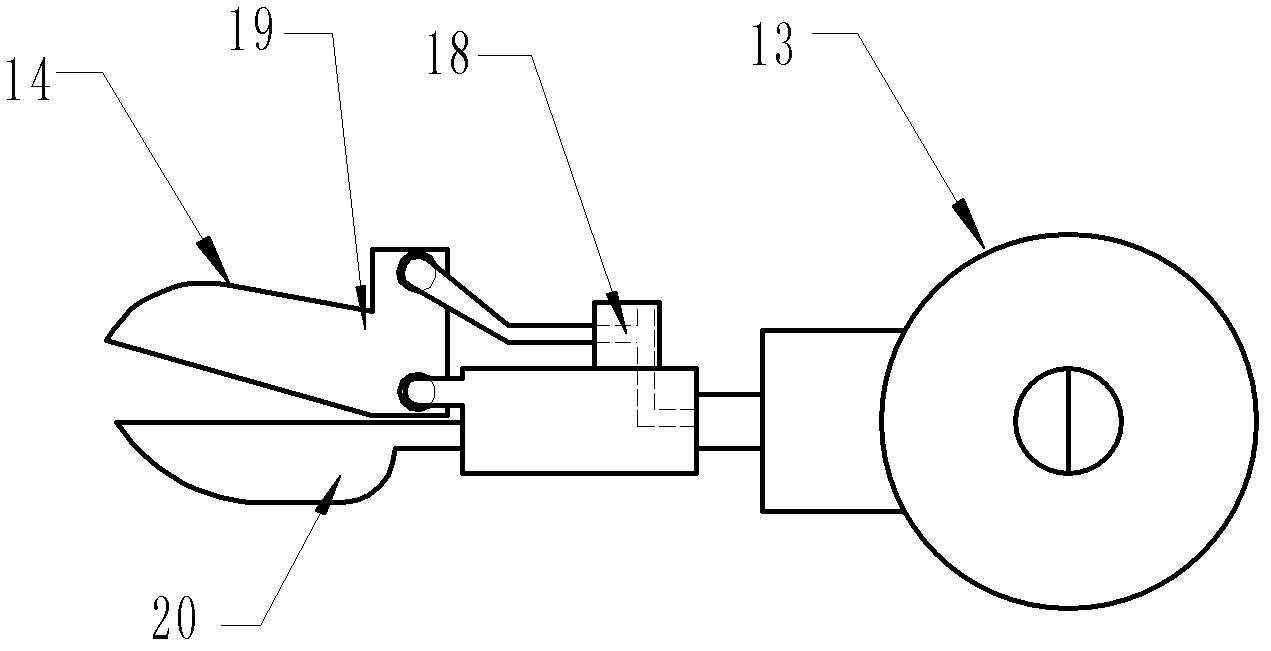
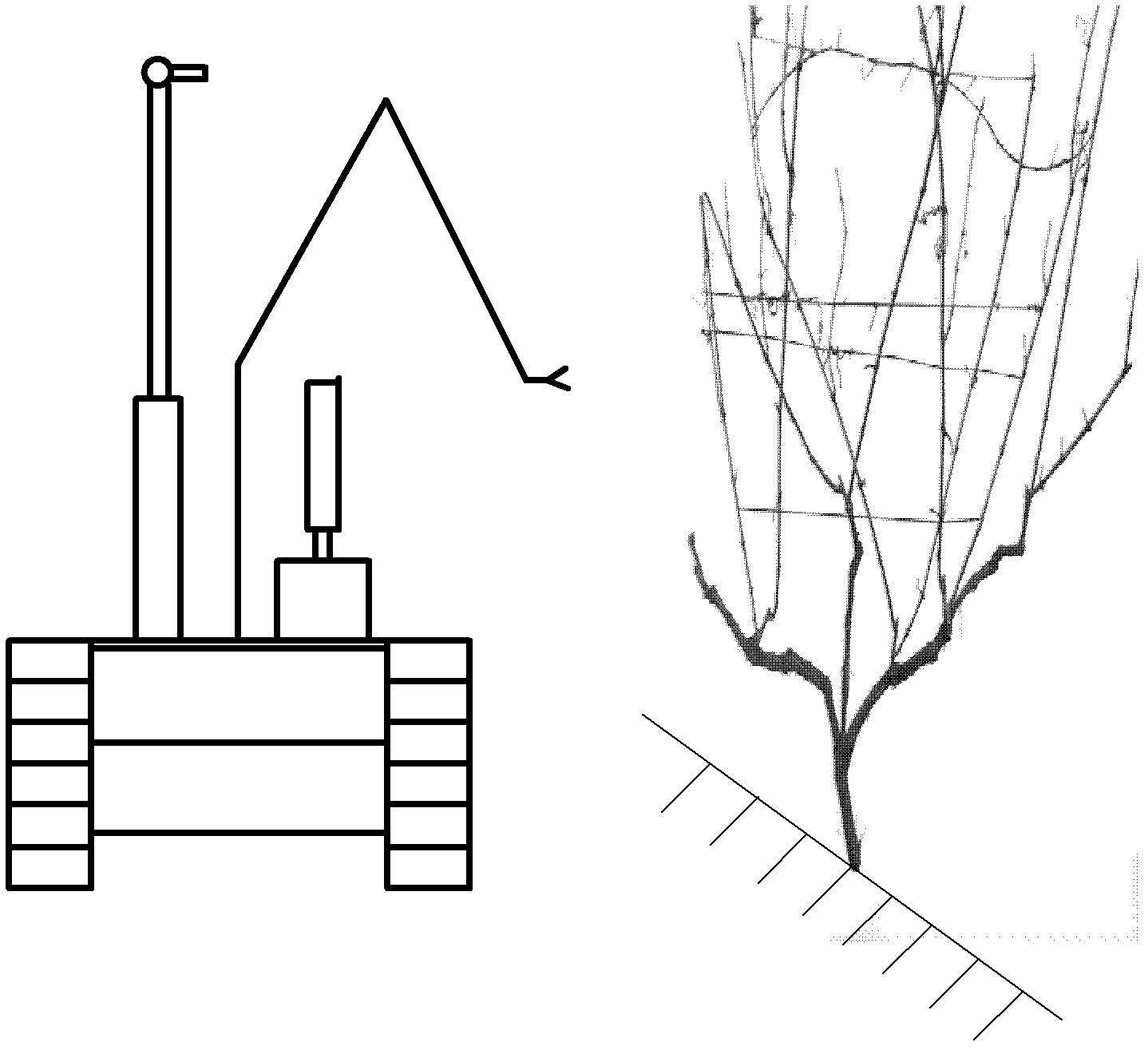
[0024] refer to figure 1 , a grapevine pruning robot system, comprising an automatic navigation module 1, a pruning module 2, and a binocular stereo vision system 3.
[0025] The automatic navigation module 1 is based on the crawler vehicle 4, and includes a pan-tilt camera 5, left and right wheel drivers (not shown in the figure, located in the crawler vehicle 4 body), and an industrial computer 6. The automatic navigation module 1 is driven by the front large wheel 7 motors, and the other wheels follow-up. The pan-tilt camera 5 installed directly in front of the crawler vehicle 4 obtains road condition image information in real time; the industrial computer 6 is used to analyze and process the road condition image information, obtain navigation parameters and issue navigation parameters to the left and right wheel drivers; the left and right drivers control the spee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More