

Five-freedom-degree hybrid robot
A degree of freedom, robot technology, applied in the field of robots, can solve problems such as inconvenience of real-time control, and achieve the effect of improving rigidity, facilitating manufacturing and assembly, and reducing external dimensions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The five-degree-of-freedom hybrid robot of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
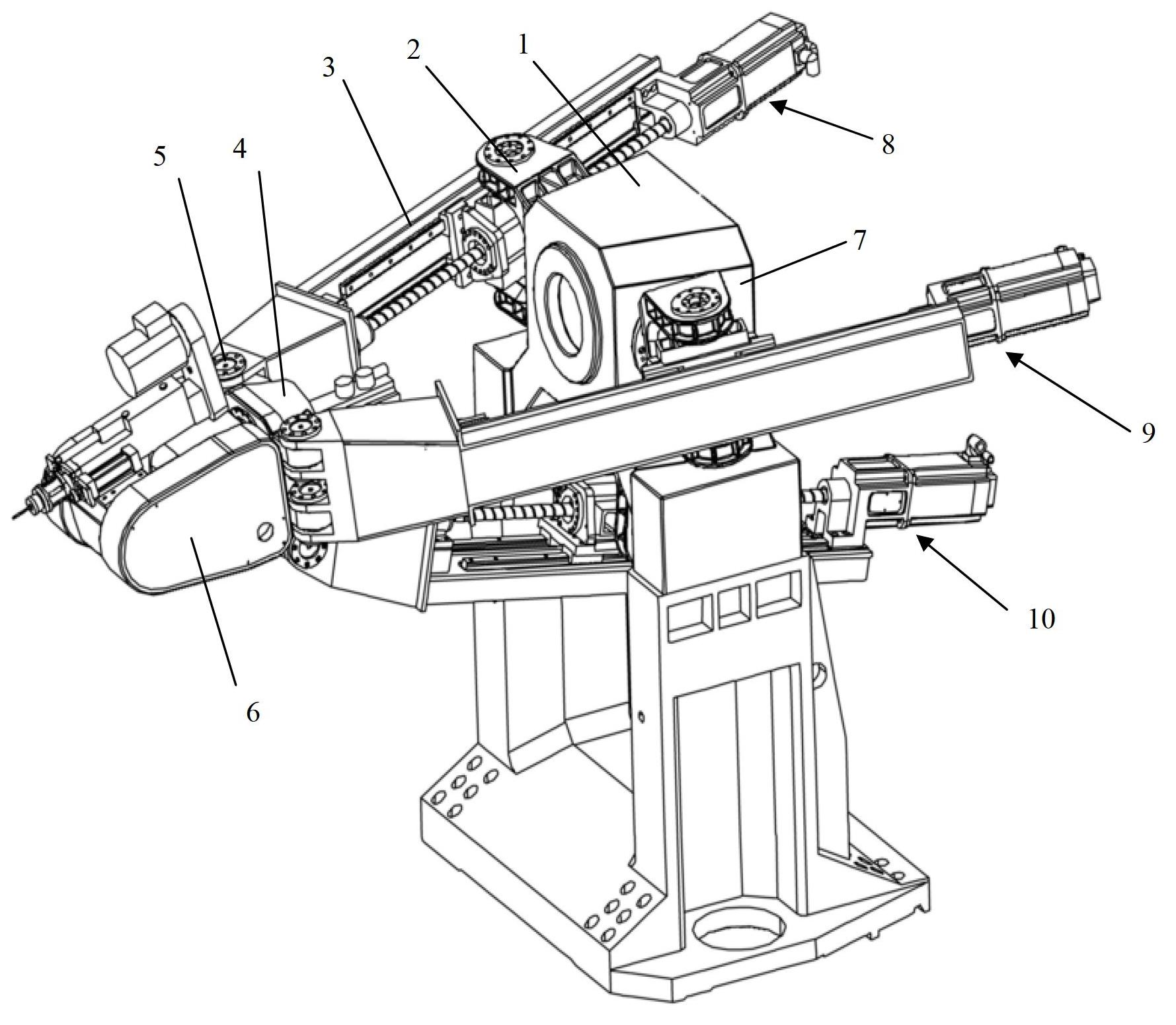
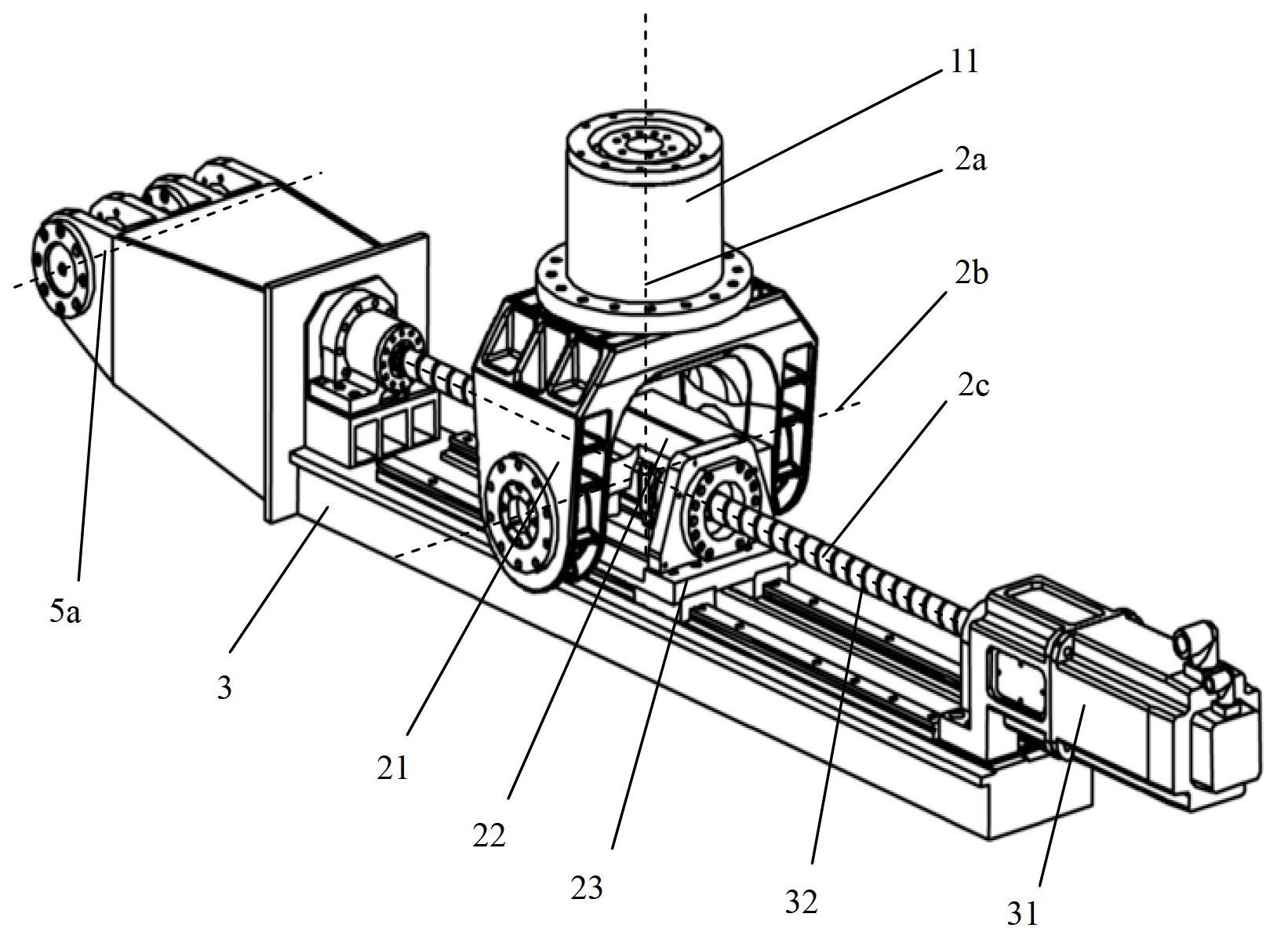
[0030] like figure 1 As shown, the five-degree-of-freedom hybrid robot of the present invention includes a fixed frame 1, a moving platform 4, a two-degree-of-freedom positioning head 6 connected to the end of the moving platform 4, and three first branch chains 8 with the same structure. Two branch chains 9 and the third branch chain 10, each branch chain all comprises the first hinge 2, the second hinge 5, the connecting rod 3 and the driving device arranged at one end of the connecting rod 3, the first branch chain 8 and the second branch chain 9 are symmetrically connected on both sides of the upper end of the fixed frame 1 through their own first hinge 2, and the third branch chain 10 runs through the fixed frame 1 and is located between the first branch chain 8 and the The bottom of the second branch c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More