

Rapid detection method of sub-pixel precision industrial object
A detection method and sub-pixel technology, applied in the field of image processing and computer vision, can solve the problems of matching difficulty, sparse texture, time-consuming feature points, etc., achieve high precision, high precision, and achieve the effect of rotation invariance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below in conjunction with the accompanying drawings.
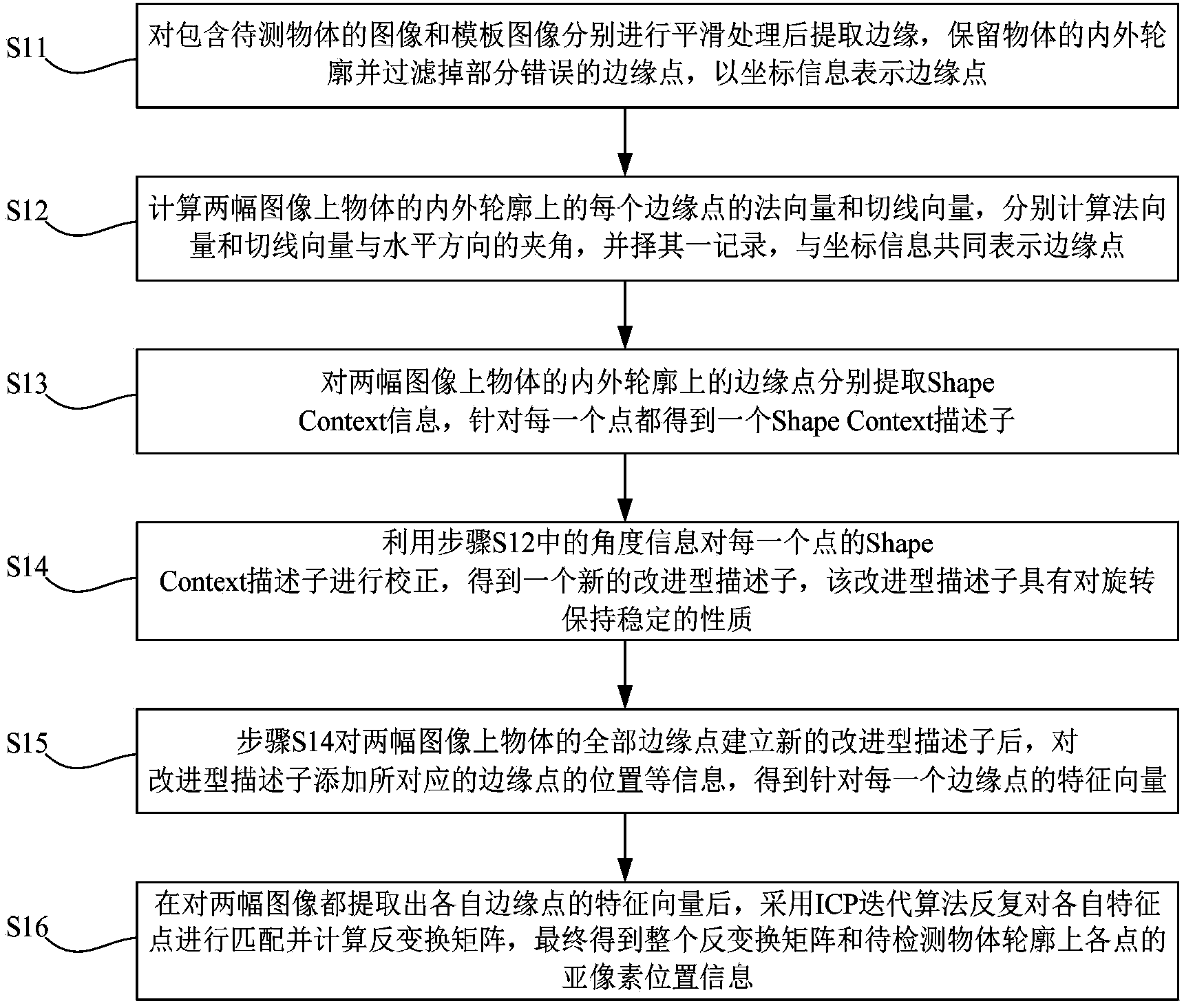
[0062] see Figure 1 to Figure 8 , a sub-pixel precision industrial object rapid detection method, comprising the following steps:
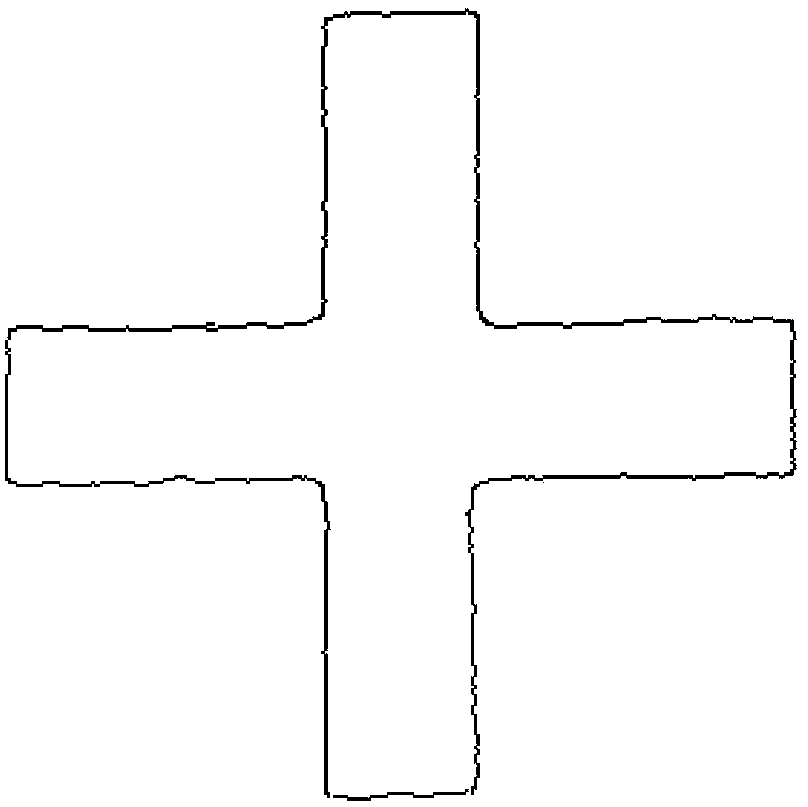
[0063] S11: Smoothing the image containing the object to be tested and the template image respectively, extracting edges, retaining the inner and outer contours of the object and filtering out some erroneous edge points, and representing the edge points with coordinate information.
[0064] After the image containing the object to be detected and the template image are read into the computer, the contour extraction processing operation is performed on the two images respectively, which specifically includes the following steps:
[0065] S111: From the image of the object to be tested and the template image, find out the approximate range of the object in the image, and expand the range to extract the object area.
[0066] S112: Perfor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More