

Method for measuring noise estimation and data fusion for allowance inertia measuring unit
An inertial measurement unit and inertial measurement technology, applied in the field of inertial navigation, can solve problems such as poor adaptability to different noise distributions, low data fusion accuracy, and inability to achieve estimation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
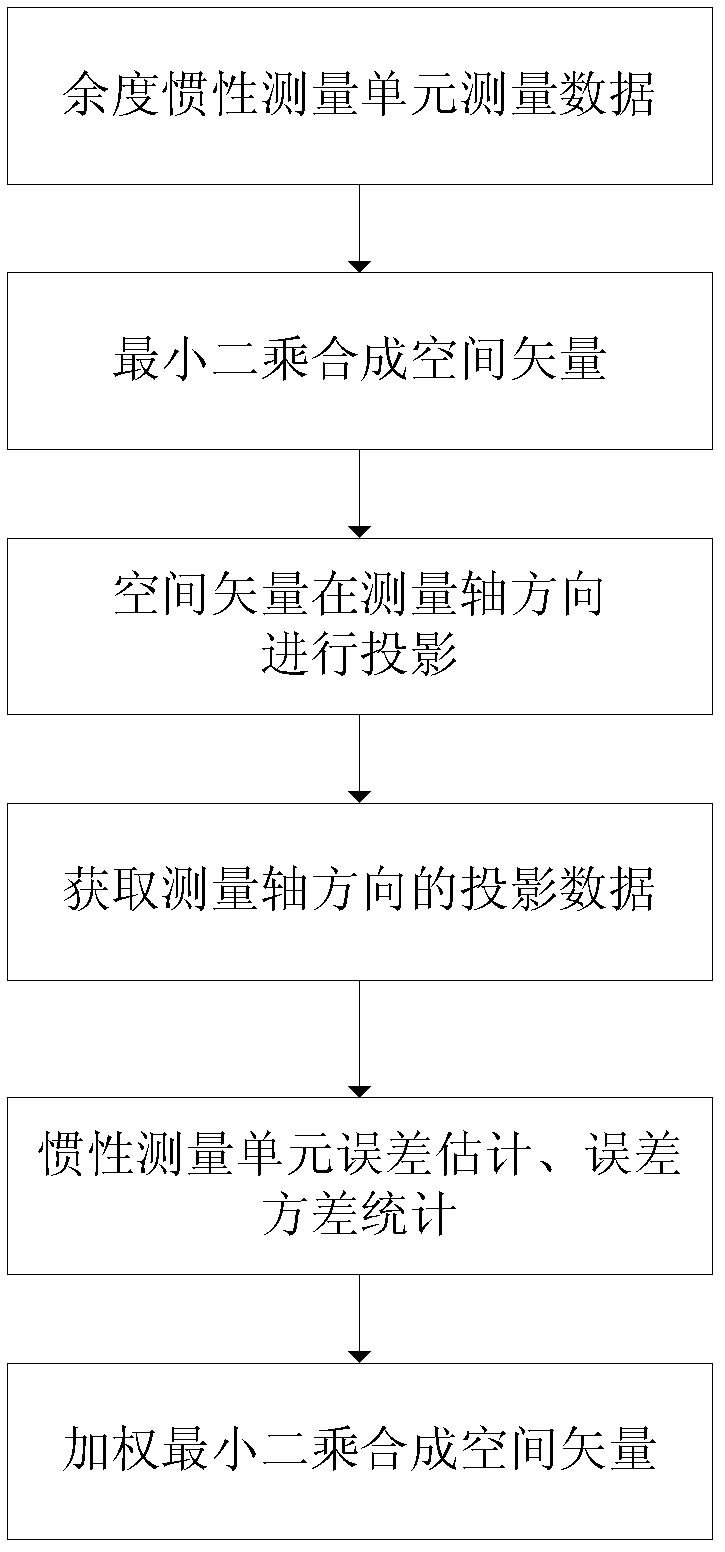
[0081] The initial position of the carrier in this embodiment is 116.7° east longitude, 39° north latitude, 800m in altitude, 257m / s in speed, 35.2° in course angle, and 200s in flight time. The random drift of the gyro is 0.01° / h, the random drift of the accelerometer is 1 μg, the data measurement period is 0.01s, and the inertial navigation solution period is 0.01s. Applying a method for estimating error in measurement error and data fusion method based on least squares for redundant sensors provided by the present invention, such as figure 1 The flow chart shown is realized through the following steps:
[0082] Step 1: Obtain the spatial synthesis vector of the carrier axis;
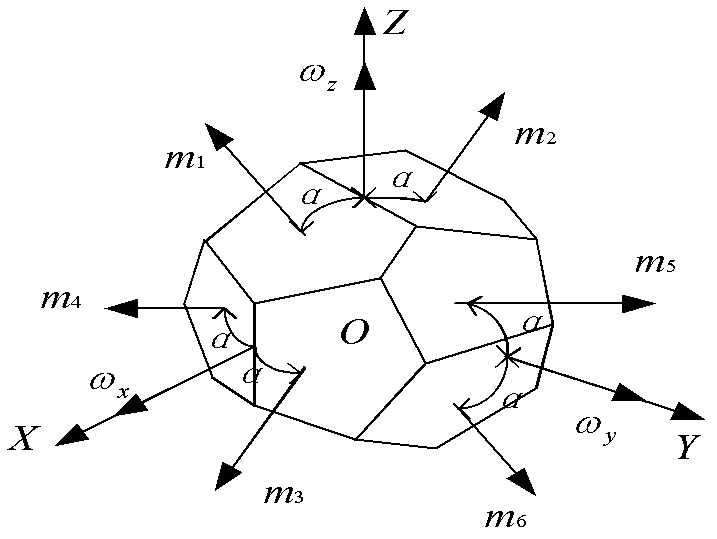
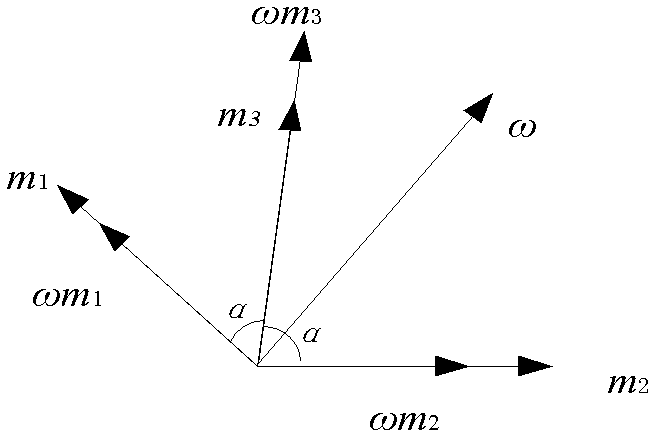
[0083] The inertial measurement unit in the redundancy sensor measures the angular rate or acceleration component information along the measurement axis of the redundancy sensor relative to the inertial space, which is called inertial measurement data. Utilizing the inertial measurement data, throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More