Mechanical hand control system
A control system and manipulator technology, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problem of no independent control device
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] A manipulator control system of the present invention will be described in detail below in conjunction with embodiments and drawings.
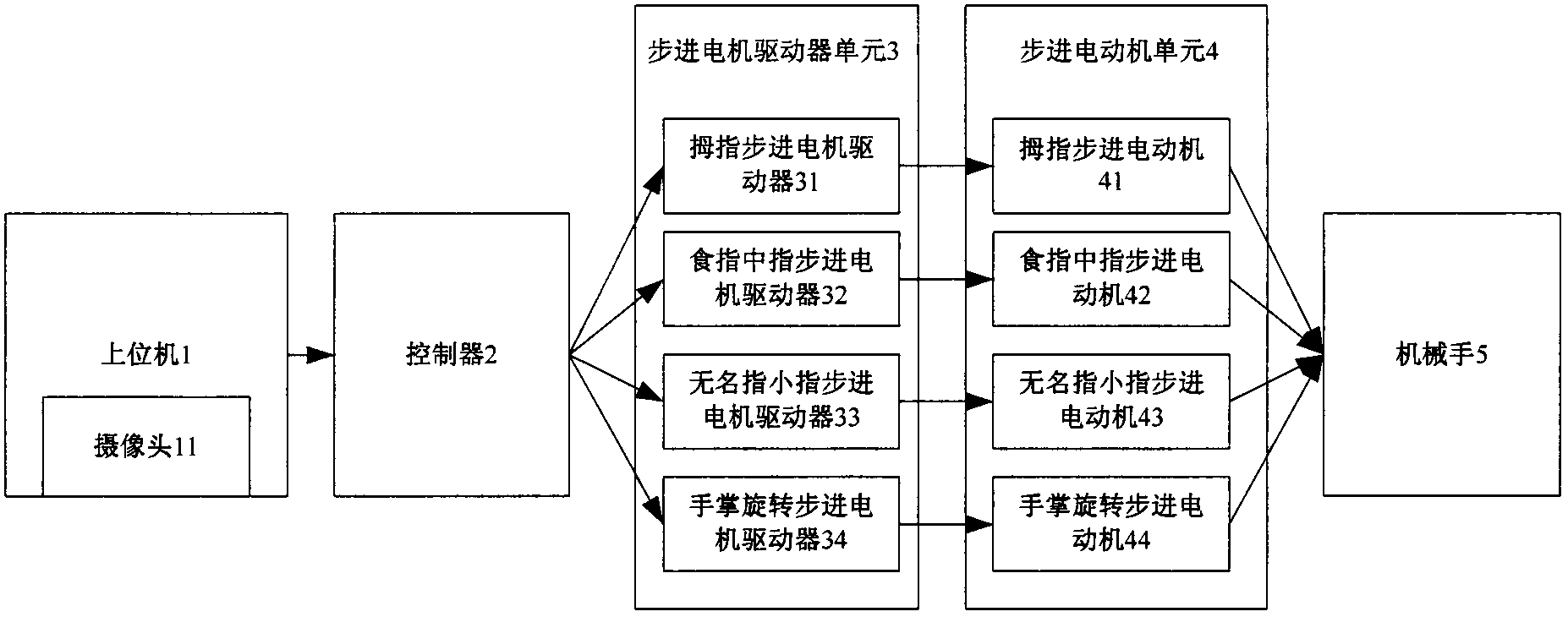
[0036] Such as figure 1 As shown, a kind of manipulator control system of the present invention includes a host computer 1, and is also provided with: a controller 2, which is used to receive the signal of the host computer 1, and send a signal to the stepper motor driver unit 3 according to the received signal Control signal; the stepper motor driver unit 3 is used to receive the control signal sent by the controller 2, and drives the stepper motor unit 4 to perform actions according to the control requirements; the stepper motor unit 4 is used for stepper motor driver unit 3 Under the drive of the control manipulator 5 stretching and rotation.
[0037] The host computer 1 includes a camera 11 for acquiring external visual signals.
[0038] Described stepper motor drive unit 3 comprises the thumb stepper motor driver 31 that drives t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com