

Three-coordinate double-support arm positioner
A three-coordinate and locator technology, which is applied in aircraft assembly, aircraft parts, ground devices, etc., can solve problems such as inability to perform error compensation, poor reconfigurability, weak locator flexibility, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
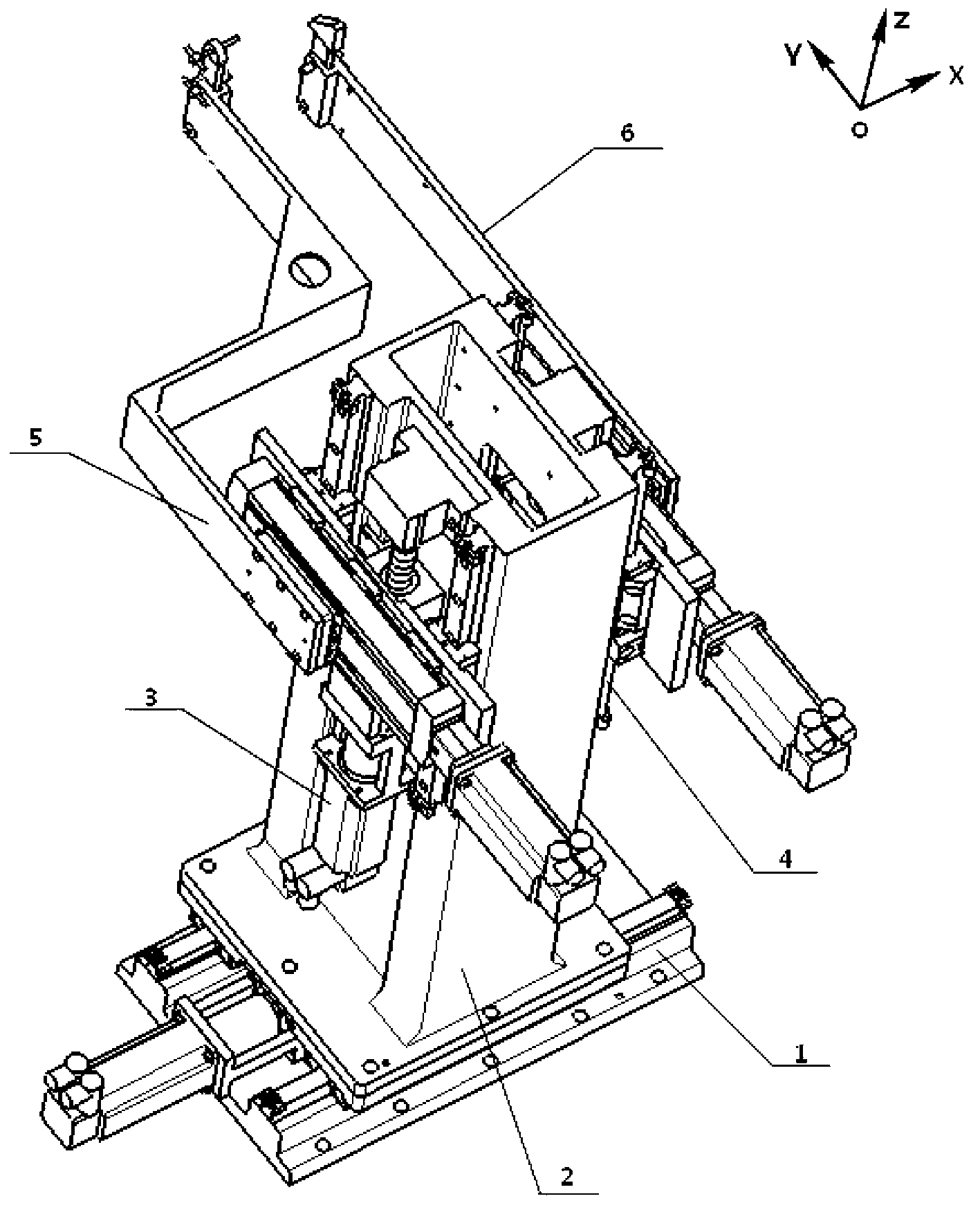
[0033] This embodiment is a three-coordinate double-arm positioner. Including X-axis moving mechanism, Z-axis moving mechanism, Y-axis moving mechanism, supporting column, X-axis moving mechanism 1 is fixedly installed on the base through the base connecting plate, supporting column 2 is located on the upper part of X-axis moving mechanism 1; Z-axis moving The mechanism is divided into a first Z-axis moving mechanism 3 and a second Z-axis moving mechanism 4, and the first Z-axis moving mechanism 3 and the second Z-axis moving mechanism 4 are installed on both sides of the support column 2 respectively; the Y-axis moving mechanism is composed of the second Z-axis moving mechanism A Y-axis moving mechanism 5 and a second Y-axis moving mechanism 6 are composed, the first Y-axis moving mechanism 5 is fixedly connected with the first Z-axis moving mechanism 3, the second Y-axis moving mechanism 6 is fixed with the second Z-axis moving mechanism 4 Even; to achieve precise positionin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More