

Method and system for heating of robots in cold environments
一种机器人、冷环境的技术,应用在控制系统、机械手、电动机控制等方向,能够解决增加设备成本、冷的部件磨损很利害等问题,达到节约时间、快速加热、保护损坏的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
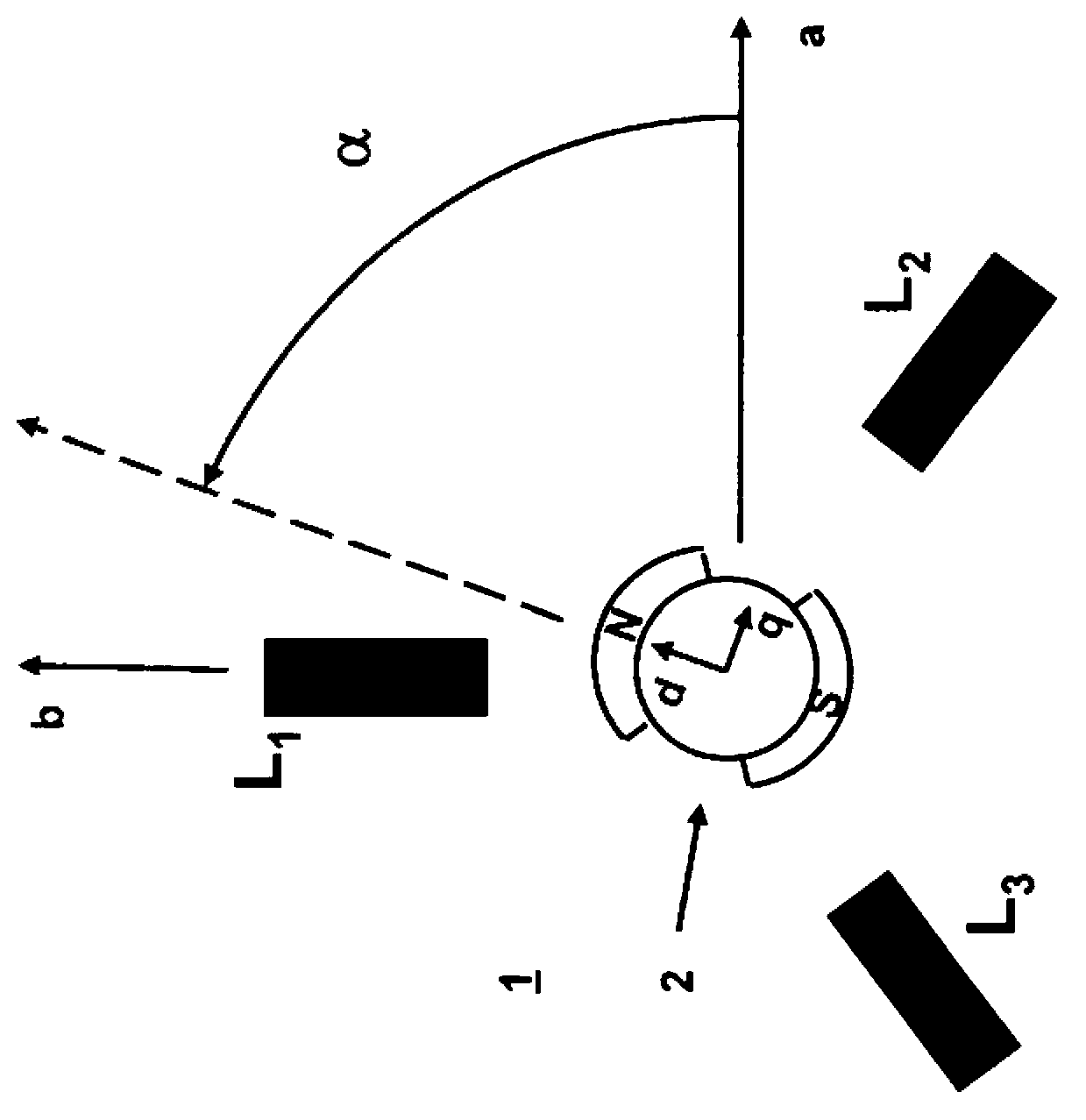
[0014] figure 1 A permanent magnet brushless or synchronous motor 1 is shown with a rotor coordinate system in a stator coordinate system and a rotor position, the permanent magnet brushless or synchronous motor 1 comprising:
[0015] Three motor phases, which include the stator coils L 1 , L 2 , L 3 ,
[0016] · Cartesian stator coordinate system with axis a and axis b, respectively,
[0017] · A rotor 2 with permanent magnets having a north pole N and a south pole S,
[0018] a Cartesian rotor coordinate system with axes d and q, respectively,
[0019] • Rotor position α relative to the stator coordinate system a,b, which means that α corresponds to the angle between the stator axis a and the rotor axis d.
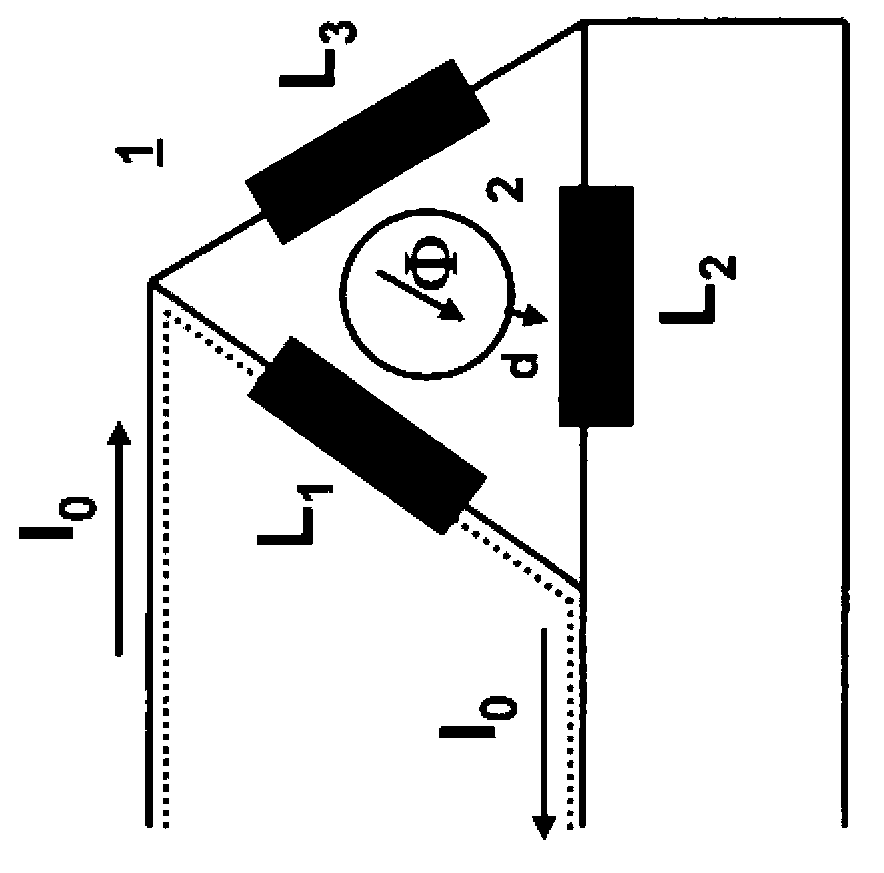
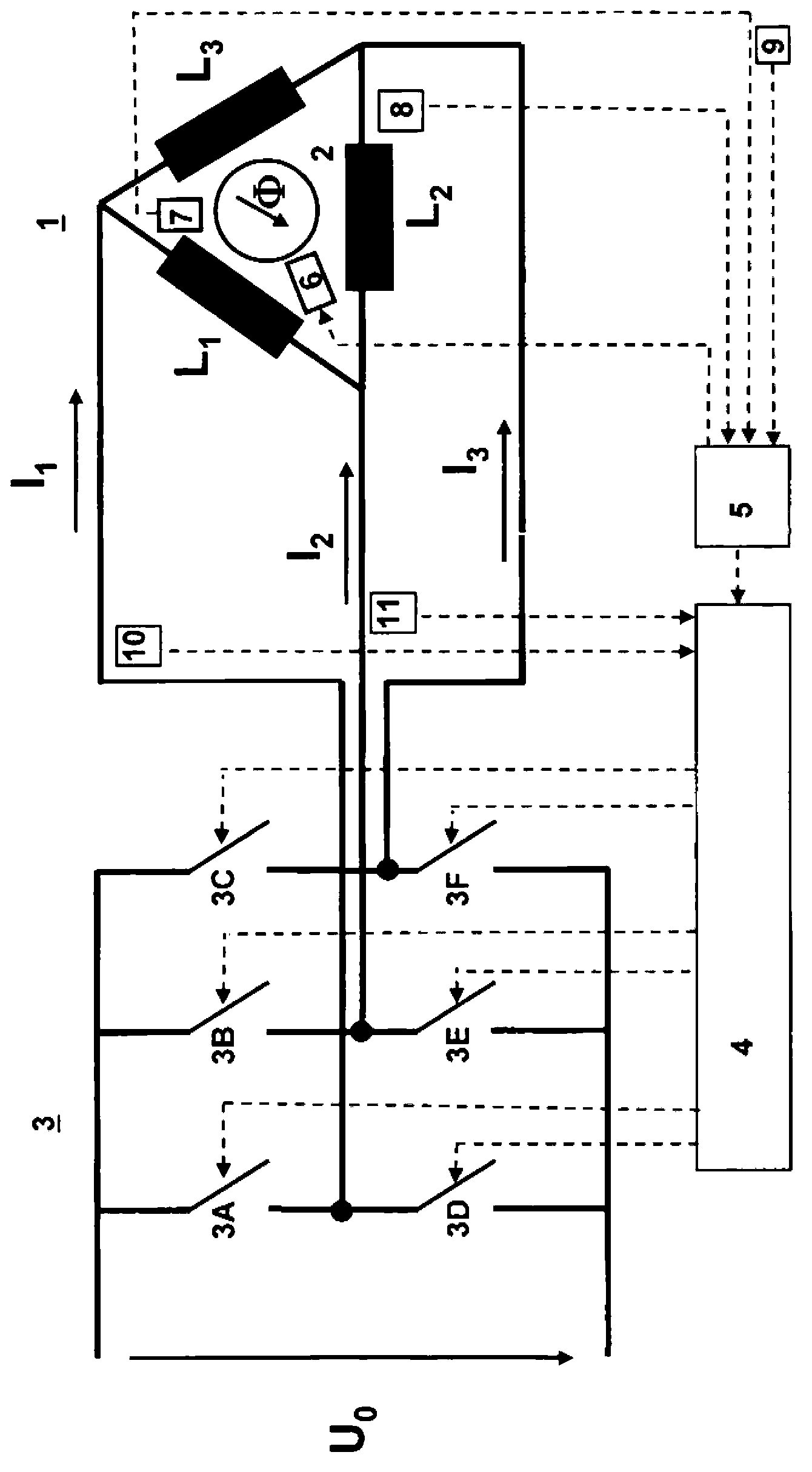
[0020] figure 2 A robot drive system with inverters and motors is shown, comprising:
[0021] · Rotating field inverter 3 with six semiconductor devices 3A, 3B, 3C, 3D, 3E, 3F arranged in relation to the input DC voltage U 0 Three-phase bridge connection and ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More