

Network teleoperation robot system and time delay overcoming method
A teleoperation robot and network technology, applied in the field of robotics, can solve problems such as complex control algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
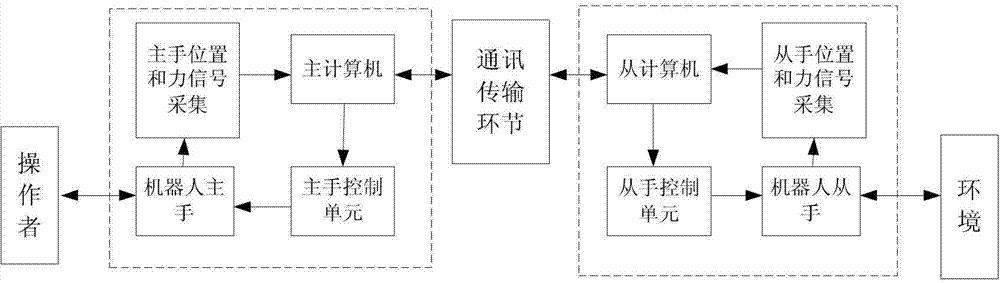
[0075] like figure 1 As shown, the network teleoperation robot system consists of two manipulators with the same structure and symmetrical functions connected together through the network communication link.
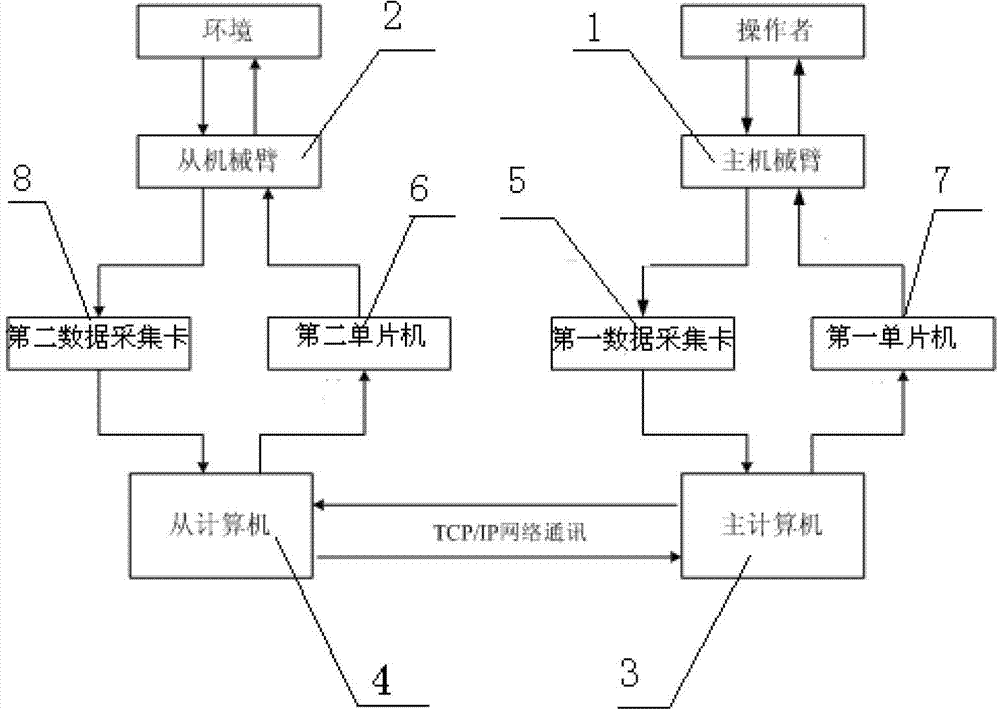
[0076] like figure 2 As shown, the network teleoperation robot system includes a master manipulator 1, a slave manipulator 2, a master computer 3, a slave computer 4, a first data acquisition card 5, a second data acquisition card 6, a first single-chip microcomputer 7, and a second single-chip microcomputer 8. The main computer 3 collects the position and force signal of the master mechanical arm 1 through the first data acquisition card 5, and the slave computer 4 acquires the position and force signal of the slave mechanical arm 2 through the second data acquisition card 6. 3 and the slave computer 4 transmit the position and force...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More