

Intelligent target control method
A control method and control method technology, applied in the direction of targets, movable targets, offensive equipment, etc., can solve the problems of inability to save training records and print reports, insufficient control flexibility and reliability, low efficiency, etc., to achieve high precision and control Flexible methods and the effect of ensuring information security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
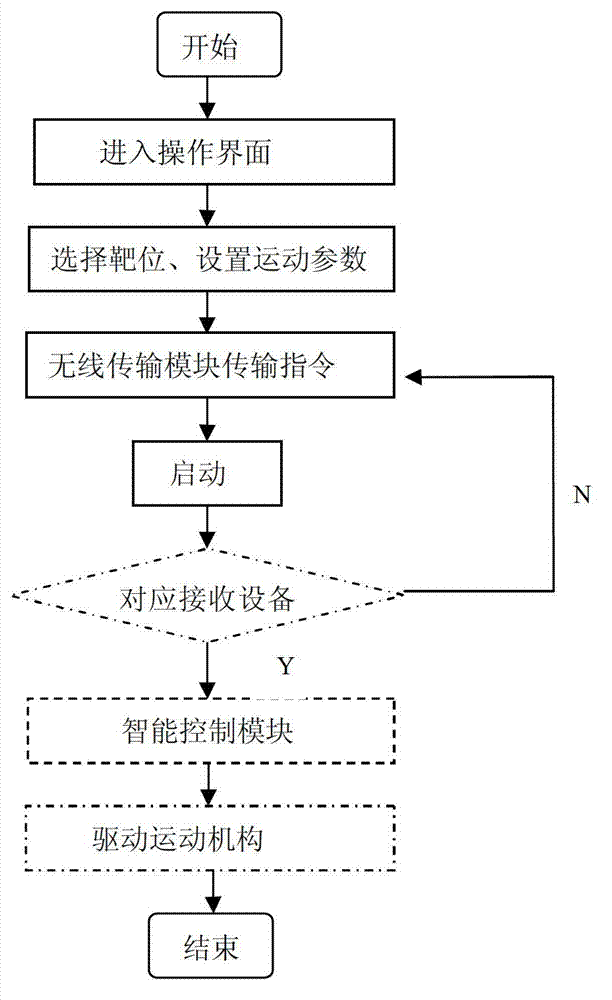
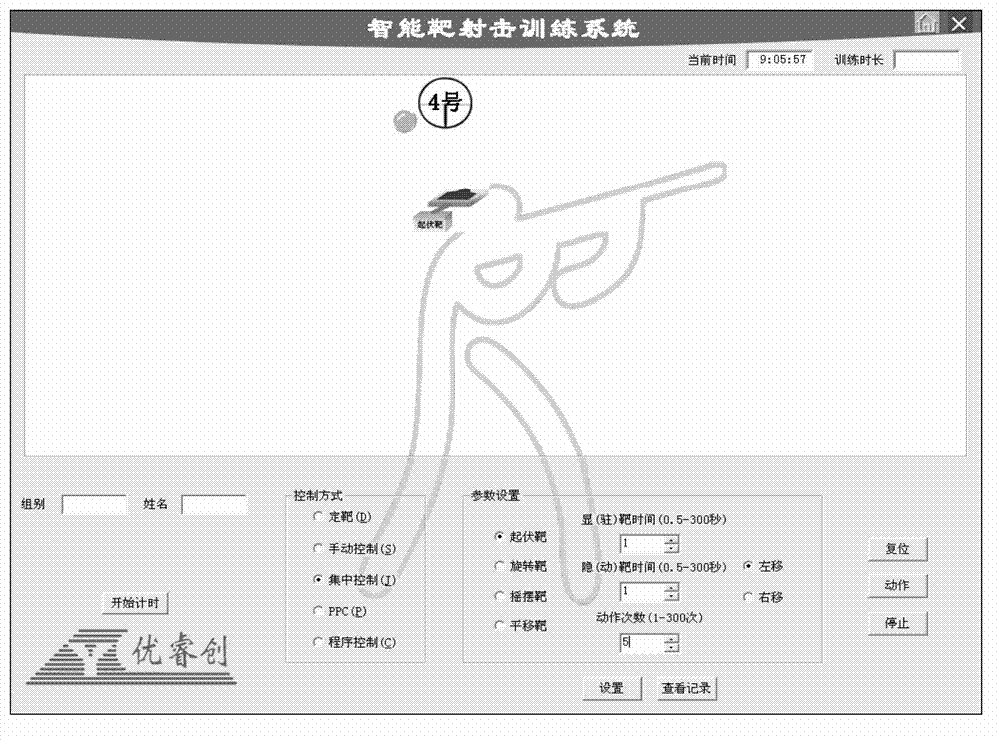
[0028] Such as figure 1 As shown, for example: use the host computer system to control the No. 4 undulating target to move, and operate in the "centralized control" mode, its time to show the target is 1 second, and the time to hide the target is also 1 second, and it operates 5 times in a row.
[0029] First, turn on the upper computer (industrial computer), choose to enter the login interface of the client, enter the correct account password, and log in to the client.
[0030] Select the No. 4 undulating target to be controlled, select the centralized control mode, set the target display time to 1 second, the hidden target time to 1 second, and perform 5 actions, such as figure 2 shown.
[0031] The wireless transmission module sends control data to the corresponding lower computer system (single chip microcomputer).
[0032] After the lower computer system receives the control data, it sends the control data to the driving motion mechanism (motor and reducer, etc.), and ...
Embodiment 2
[0036] The difference between this embodiment and Embodiment 1 is that it is not an undulating target, but a translational target. The length of the guide rail of the translational target is 3 meters. seconds, the corresponding translational speed of the target machine is adjustable from 0.1 m / s to 1 m / s.
Embodiment 3
[0038] After turning on the upper computer, choose to enter the administrator interface, enter the correct administrator password, and log in to the administrator interface.
[0039] Set the initial motion parameters: the display time of the rotating target is 1 second, and the hidden target time is also 1 second. Since the rotating target rotates between 0° and 90° on the horizontal plane, the initial angular velocity of the rotating target is 90° / second; similarly, the display (moving) target time of the swing target is 1 second, and the hidden (stationary) target time is also 1 second. Since the swing target swings between 45° and 135°, the initial swing target The angular velocity is 90° / sec; the apparent target time of the undulating target is 1 second, and the hidden target time is also 1 second. Since the undulating target rotates between 0° and 90°, the initial angular velocity of the undulating target is 90° / sec. second; the display (moving) target time of the trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More