

Layered spraying track planning method used for spraying robot
A spraying robot and trajectory planning technology, applied in the direction of instruments, special data processing applications, electrical digital data processing, etc., can solve the problems of harming workers' health, toxic and harmful environment, increasing economic costs, etc., and achieve good adaptability and practicability, ensure the quality of spraying, and improve the effect of spraying efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
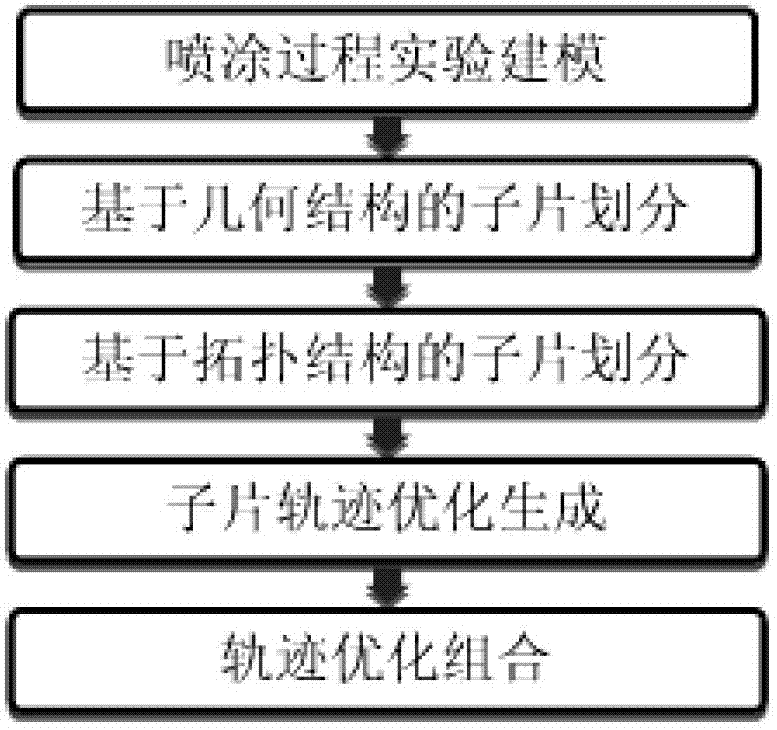
[0021] Such as figure 1 Shown, according to the spraying trajectory planning method of the present invention comprises the following steps:
[0022] 1. Experimental modeling of spraying process
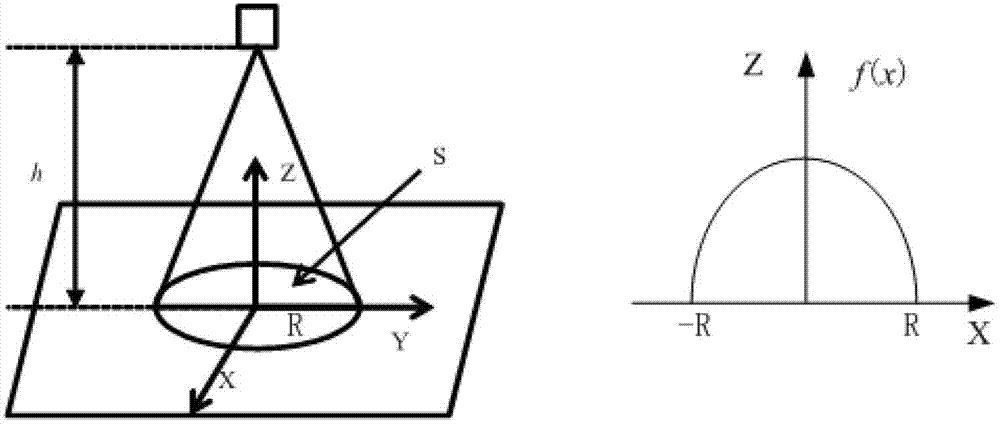
[0023] The cumulative thickness distribution model of the coating formed by the spray gun plays a vital role in the quality of the entire spray coating production. In this step, for different spraying parameters that may affect the spraying process, design a corresponding spraying experiment to measure the distribution of the coating formed by the spray gun, introduce a Gaussian sum model to represent the growth rate of the coating, and use the L-M method to fit to obtain an accurate coating. The layer growth rate model is used as the basis for subsequent steps. The specific implementation steps include:
[0024] (1) Spraying experiment and data co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More