

Scanning laser based large-scale three-dimensional terrain modeling method
A technology for scanning lasers and 3D terrain, which is applied in the field of 3D terrain modeling of probabilistic large-scale environments, and can solve the problems of compressed storage and processing terrain modeling uncertainty terrain modeling algorithm accuracy and computational complexity, and achieves good results. Economic benefits, achieving a good balance, and the effect of broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
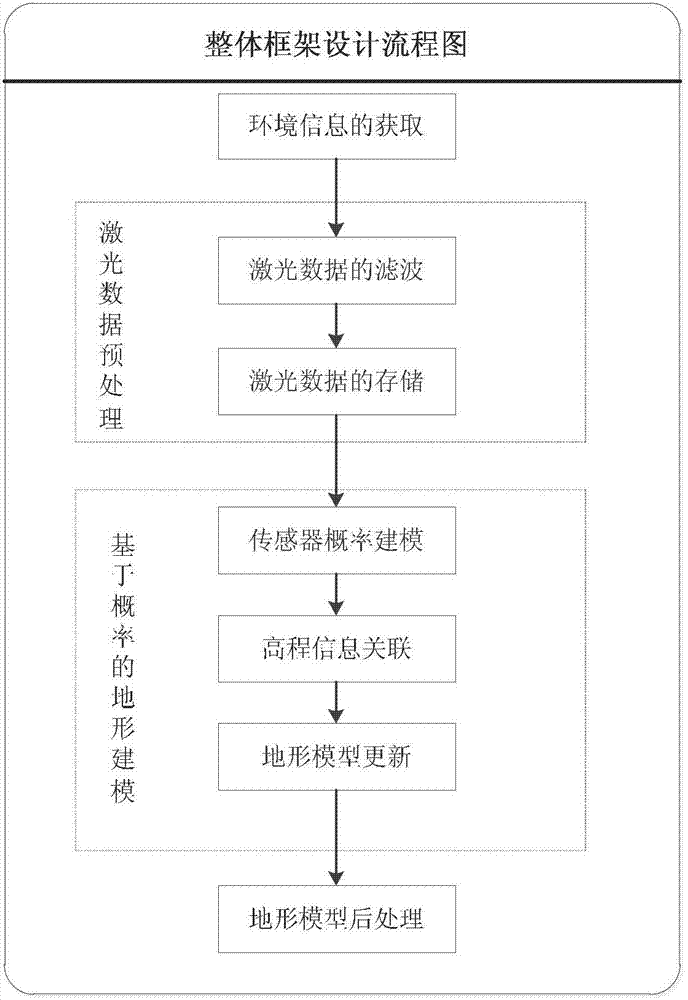
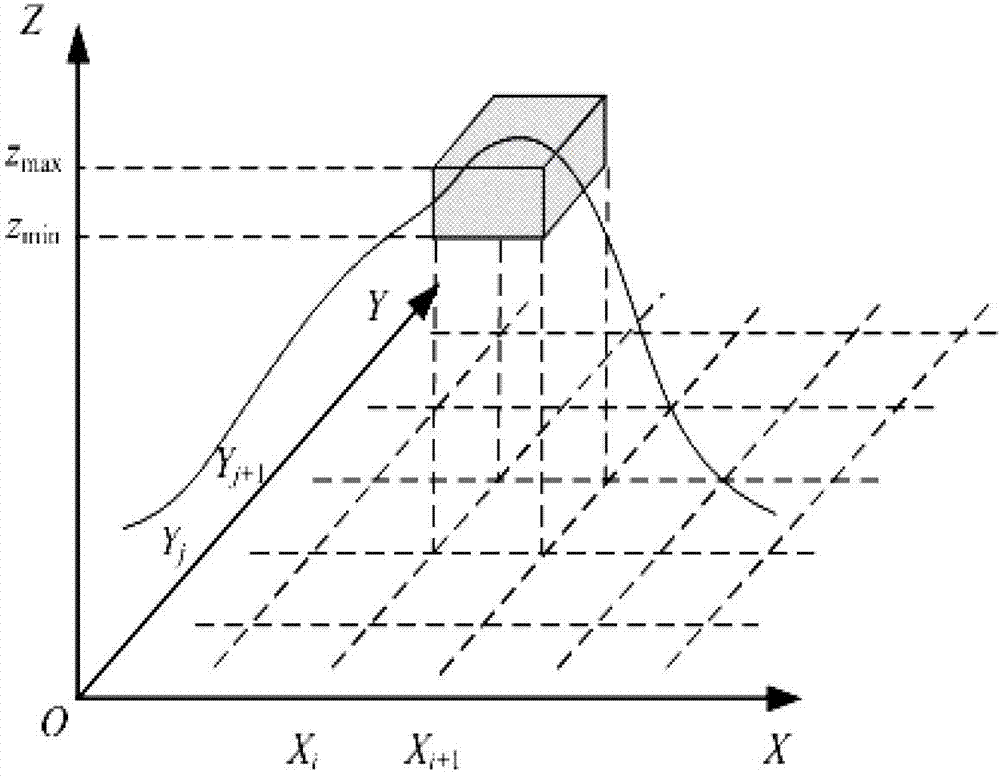
[0023] figure 1 This is the overall flow chart of the large-scale 3D terrain modeling method based on scanning lasers proposed in this patent. The terrain model used is a probabilistic elevation map (such as figure 2 shown). The specific steps of the algorithm are as follows:
[0024] 1. Acquisition and transformation of terrain data
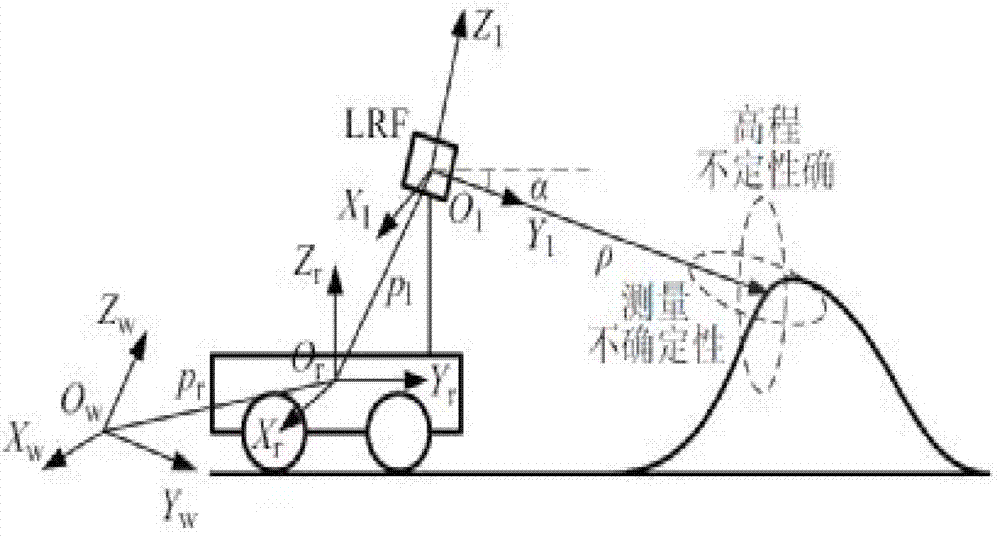
[0025] The collection of terrain data is the basis of terrain modeling. The surrounding terrain environment is scanned by a two-dimensional scanning laser installed on a mobile platform (such as a mobile robot platform) to obtain environmental perception data, and then according to the positioning sensor information (odometer and GPS) ) to perform fusion positioning on the mobile platform to obtain the global coordinates of its pose. On this basis, the original laser data is converted into a 3D point cloud b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More