

Spreader anti-sway controlling method of overhead traveling crane
An overhead crane and control method technology, applied in the directions of load hanging components, transportation and packaging, can solve the problems of complex structure, inconvenient maintenance, poor reliability, etc., and achieve high control accuracy, fast data processing, and good reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
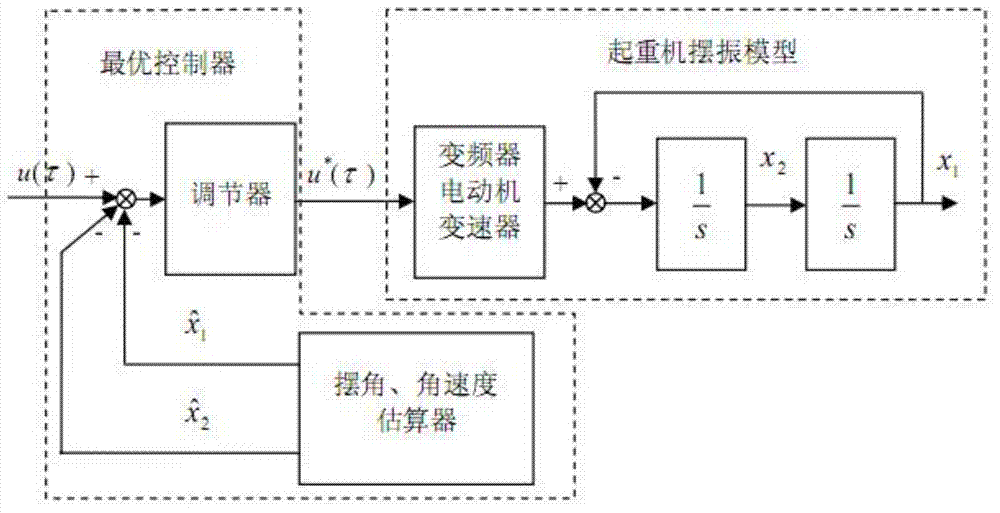
[0035] figure 1 The feed-forward anti-sway control algorithm is the basis.
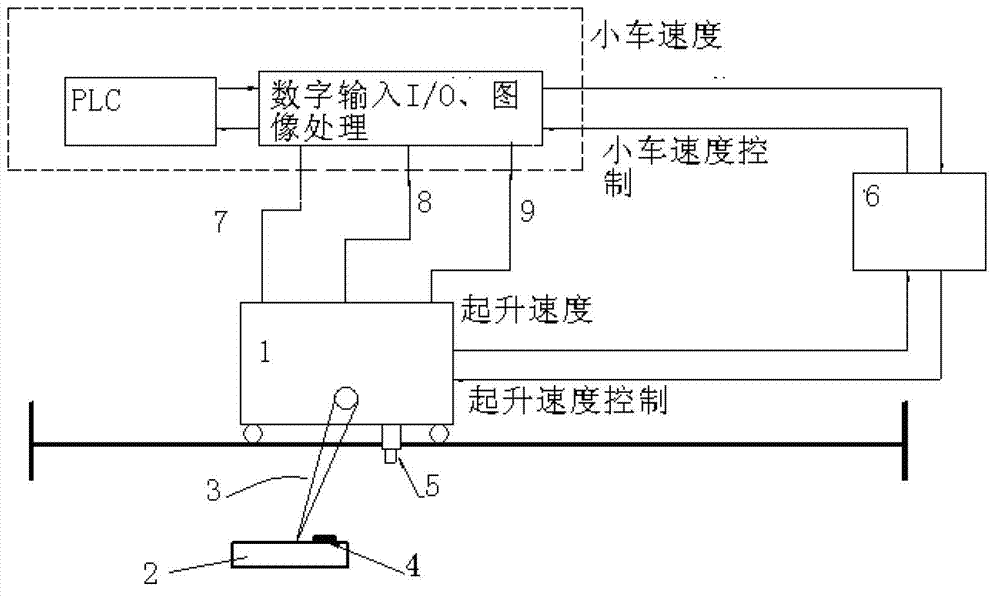
[0036] figure 2Shown is the device diagram, trolley 1, spreader 2, rope 3, camera mark 4, camera 5, frequency converter 6, trolley position detection 7, rope length detection 8, swing angle detection 9. The standard workshop is used for the experiment. The track is 23.5 meters long and 9 meters high. There are 5 measurement variables in the system: trolley position, rope length, swing angle, trolley speed and lifting speed. These five measurement variables are controlled by 2 absolute encoders. , VS710 camera system and incremental encoder measurement. The parametric speed control of the trolley and hoist acts on the AC servo motor to drive the whole system through the ABB frequency converter, so as to achieve the harmonious and coordinated work of the whole system. The control strategy and the processing of the collected measurement signals are implemented by the entire PLC processor. Various co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More