

Self-adaptive index time varying slip form posture control method of reentry flight vehicle
A re-entry vehicle and attitude control technology, applied in the field of re-entry vehicle adaptive exponential time-varying sliding mode attitude control, can solve problems such as not easy to obtain, complicated and changeable re-entry process, and weak anti-interference ability of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
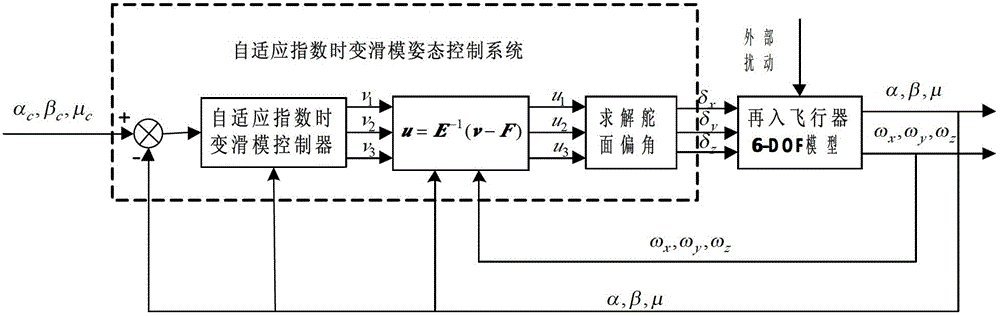
[0101] 1) Establish the six-degree-of-freedom twelve-state equation of the re-entry vehicle as the model of the controlled object, and combine the three airflow attitude angles (angle of attack α, sideslip angle β, and roll angle μ) kinematic equations involved in the equation with the three The angular velocity of rotation around the body axis (roll angular velocity ω x , yaw rate ω y , the pitch rate ω z Dynamic equation) written in affine nonlinear form (3);
[0102] 2) Perform feedback linearization processing on the above-mentioned affine nonlinear system to obtain a decoupled three-channel mathematical model of the re-entry vehicle;
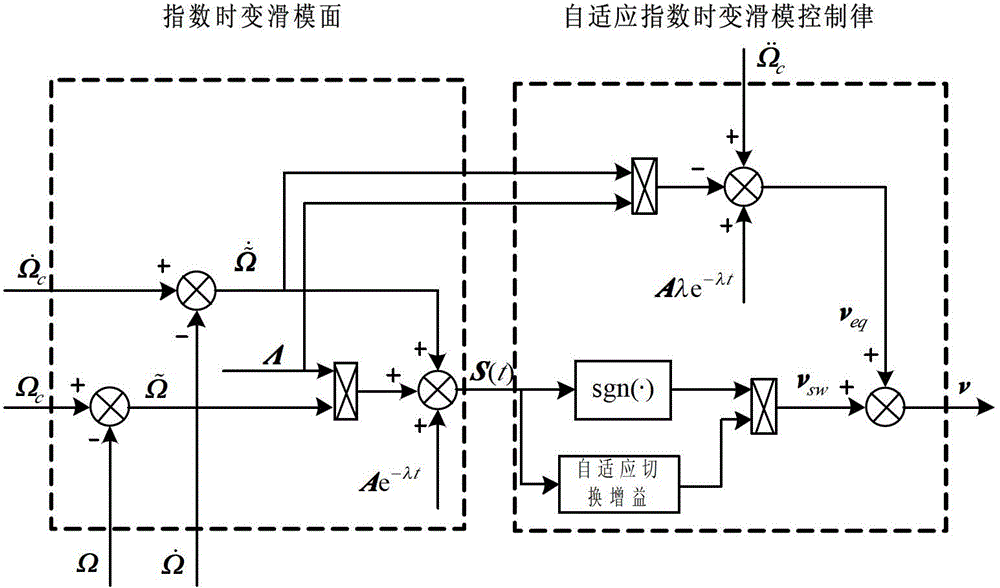
[0103] 3) Construct the exponential time-varying sliding mode function formula (9) and the corresponding control law (11), and the switching gain in the control law is calculated online through formula (13).
[0104] 4) Calculate the control torque command according to formula (14). Since the control torque cannot be directly applied to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More