

Method for controlling starting and stopping of joint movements of multi-degree-of-freedom (multi-DOF) industrial robot
An industrial robot, joint motion technology, applied in manufacturing tools, manipulators, etc., can solve problems such as affecting work efficiency and incapable of fast-paced production occasions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
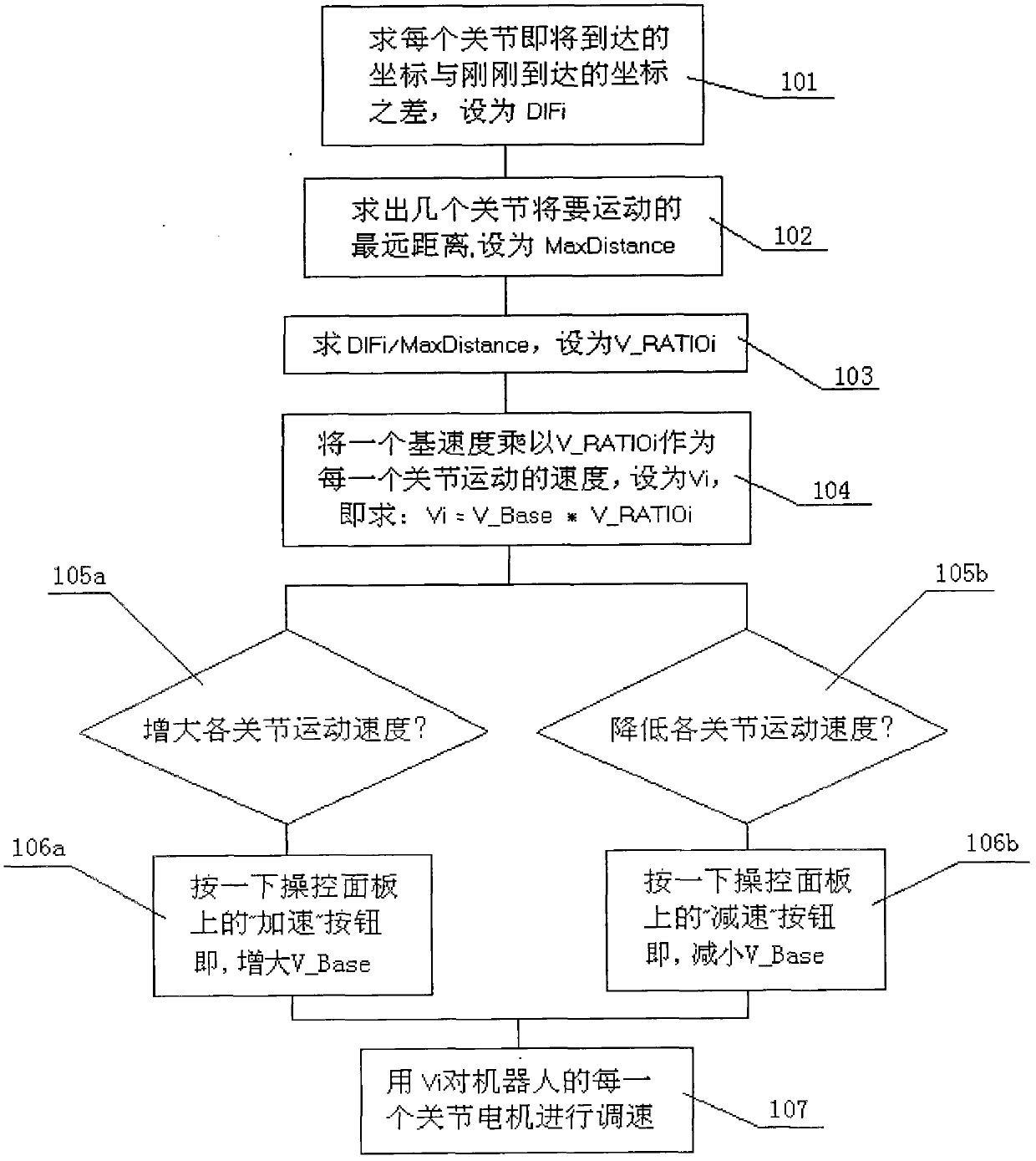
[0013] Such as figure 1 Shown: The method of controlling the servo motor speed for the above control system is:
[0014] 1) First execute step 101 to find the difference between the coordinates that each joint is about to arrive at and the coordinates just arrived, and set it as DIFi,
[0015] If the movement of each joint is the first step, DIFi is equal to the coordinate value that each joint is about to reach.
[0016] 2) Then execute step 102 to find the maximum distance that several joints will move, and set it as MaxDistance.
[0017] 3) Then execute step 103, calculate the ratio of the calculation result of step 102 and the calculation result of step 103, set it as V_RATIOi.
[0018] 4) Then execute step 104, multiply a base velocity by V_RATIOi as the velocity of each joint movement, and set it as Vi.
[0019] 5) If you want to increase the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More