

Autonomous underwater vehicle (AUV) automatic localization method
An autonomous vehicle and autonomous positioning technology, applied in satellite radio beacon positioning systems, instruments, measuring devices, etc., can solve the problems of unfavorable concealment, distance limitation of voice control methods, and easy exposure of targets, etc., to extend the time of staying in work , reduce the amount of communication, the effect of light computing load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings.
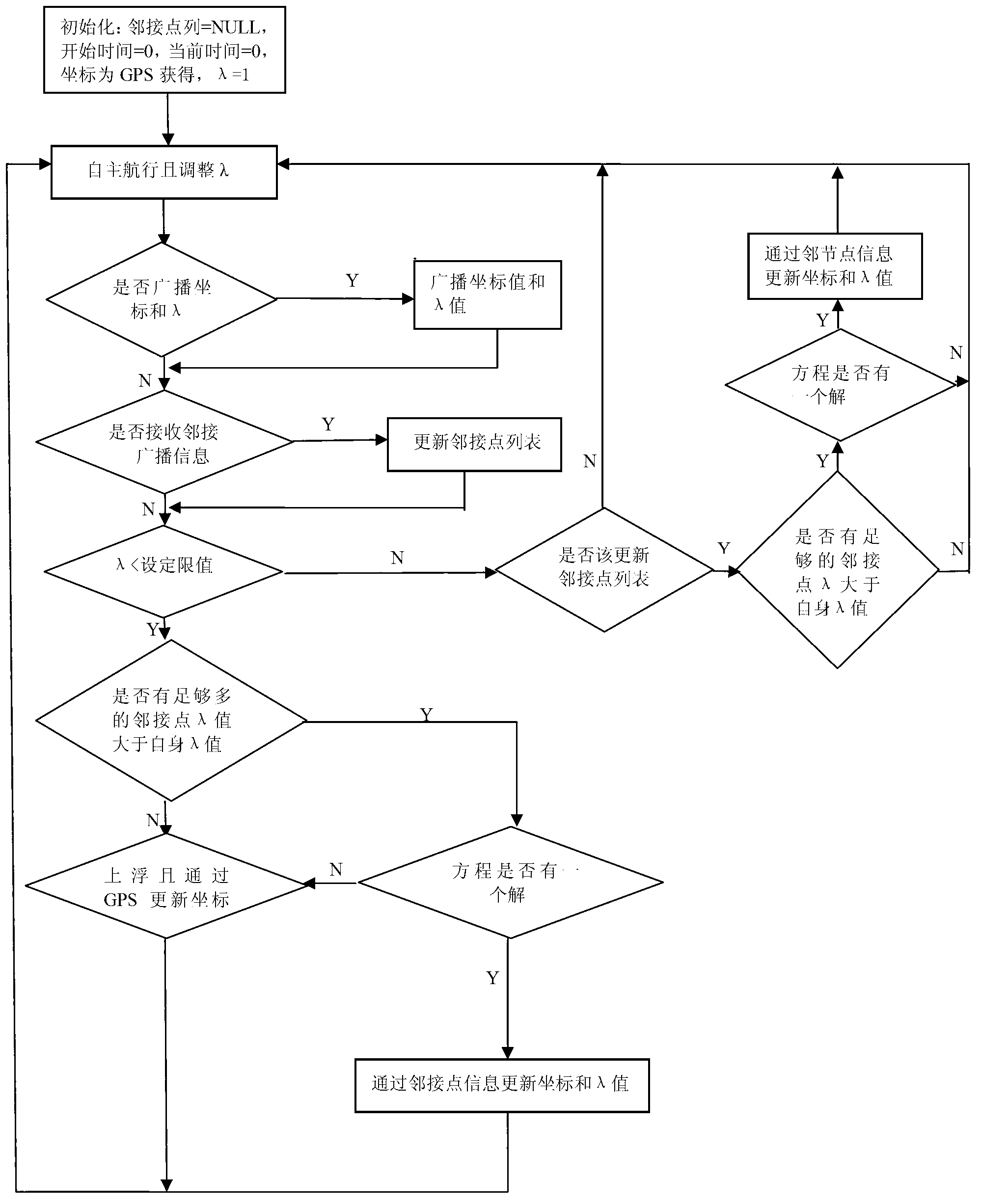
[0025] This embodiment specifically implements a method for autonomous positioning of an underwater autonomous vehicle AUV described in the present invention, including the following steps:
[0026] 1. Set the target area for each AUV, and then let the AUV autonomously go to the target position to work. Before the AUV enters the water, since the accurate GPS positioning signal can be obtained, the positioning accuracy of each AUV when it first enters the water is set to λ=1;
[0027] 2. After the AUV dives, it relies on its own navigation equipment for positioning and sails towards the pre-set target area. Due to the influence of tracking equipment and water flow on the error, the positioning accuracy will gradually decline.
[0028]3. Each AUV regularly broadcasts its coordinate information and positioning accuracy λ to the surroundin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More