

Multi-degree-of-freedom two-wheeled robot with variable gravity center
A technology of two-wheeled robots and degrees of freedom, applied in the field of robotics, can solve the problems of two-wheeled robots without trying to change two-wheeled robots, and achieve the effects of stable climbing, easy control, and reduced energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0028] This embodiment provides a multi-degree-of-freedom variable center-of-gravity two-wheeled robot, which belongs to a two-wheeled robot with the ability to adjust gravity distribution in different environments. Compared with traditional two-wheeled robots, it can better operate in different environments Achieve balance control.
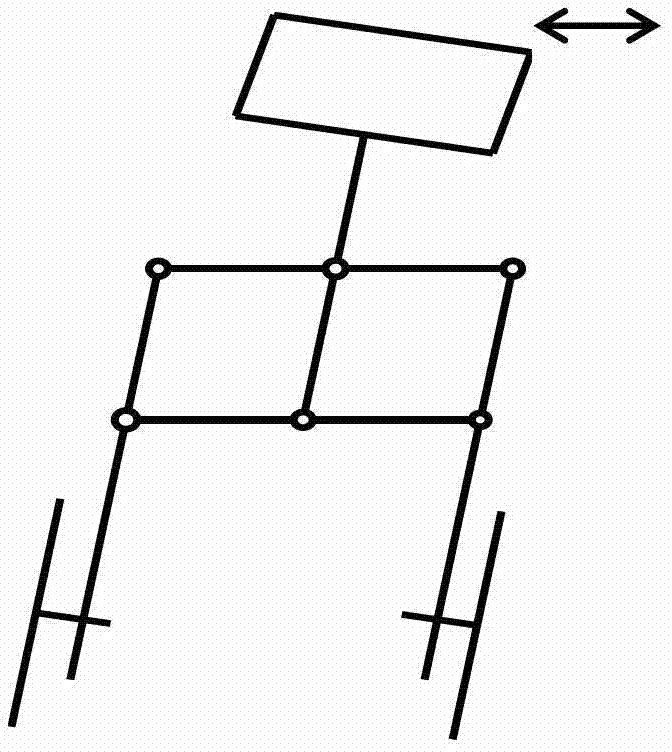
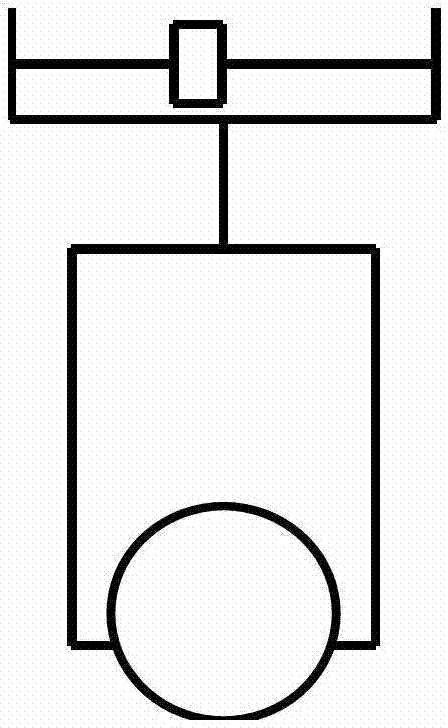
[0029] In the following description, many specific details are set forth in order to fully understand the present invention, but the present invention can also be implemented in other ways different from those described here, therefore, the present invention is not limited to the specific embodiments disclosed below limit. In the accompanying drawings figure 1 It is a schematic diagram of the left and right swing mechanism of the present invention, figure 2 is the schematic diagram of the slider mechanism.
[0030] The o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More